

Two-wheel differential motion robot chassis
A robot and chassis technology, applied in the field of robot research and development, can solve the problems such as the inability to install the structural suspension mechanism and the small remaining space of the chassis, and achieve the effects of optimal suspension, less chassis space occupation, and scientific and reasonable structural design.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
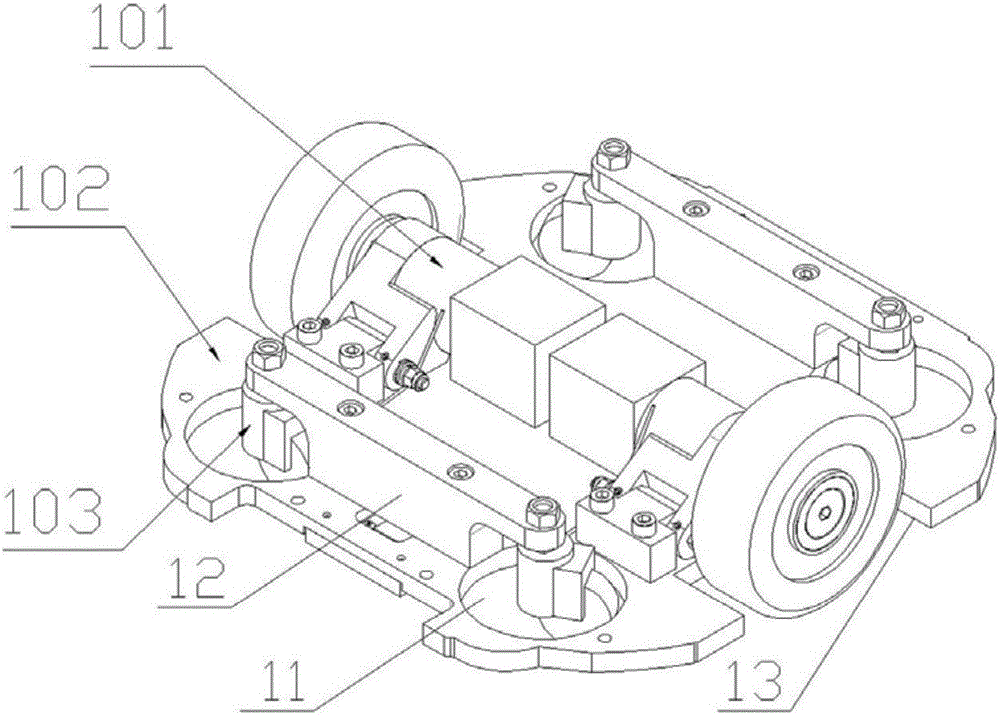
[0035] see figure 1 , with reference to Figure 2-Figure 9 , shown in the figure is a two-wheel differential robot chassis involved in the present invention, and the key technical solutions adopted are as follows:
[0036] As shown in the figure, the chassis involved in the present invention mainly includes a bottom plate 102, on which a pair of suspension mechanisms 101 are fixedly connected with the bottom plate 102 through connecting pieces.
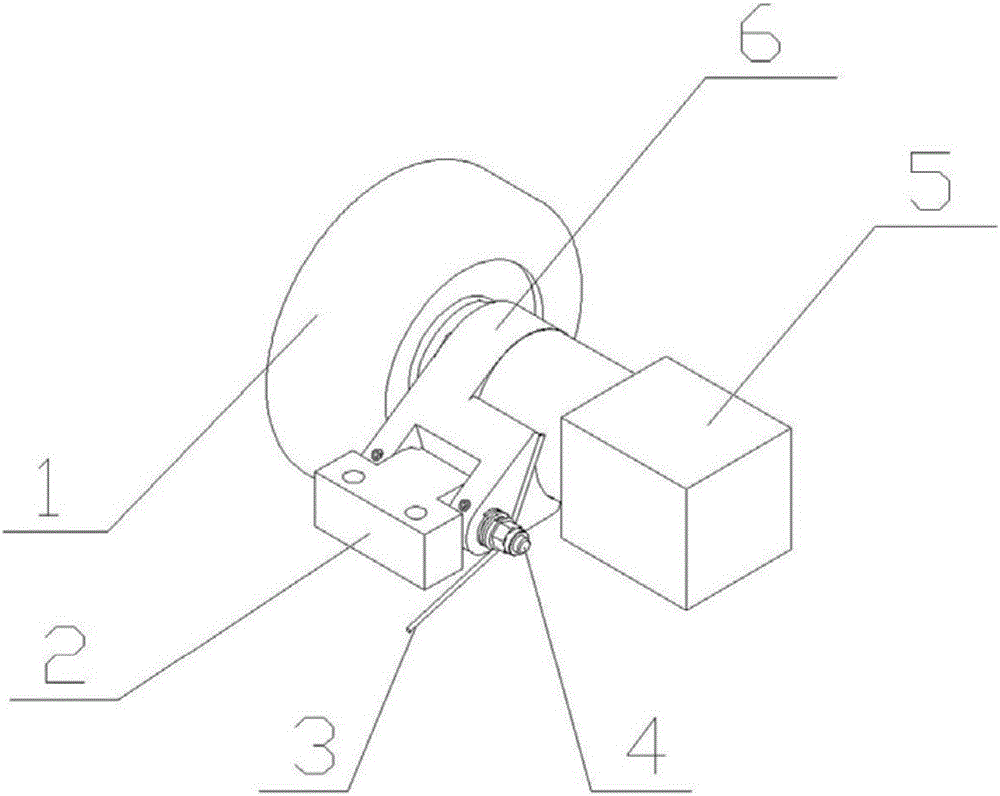
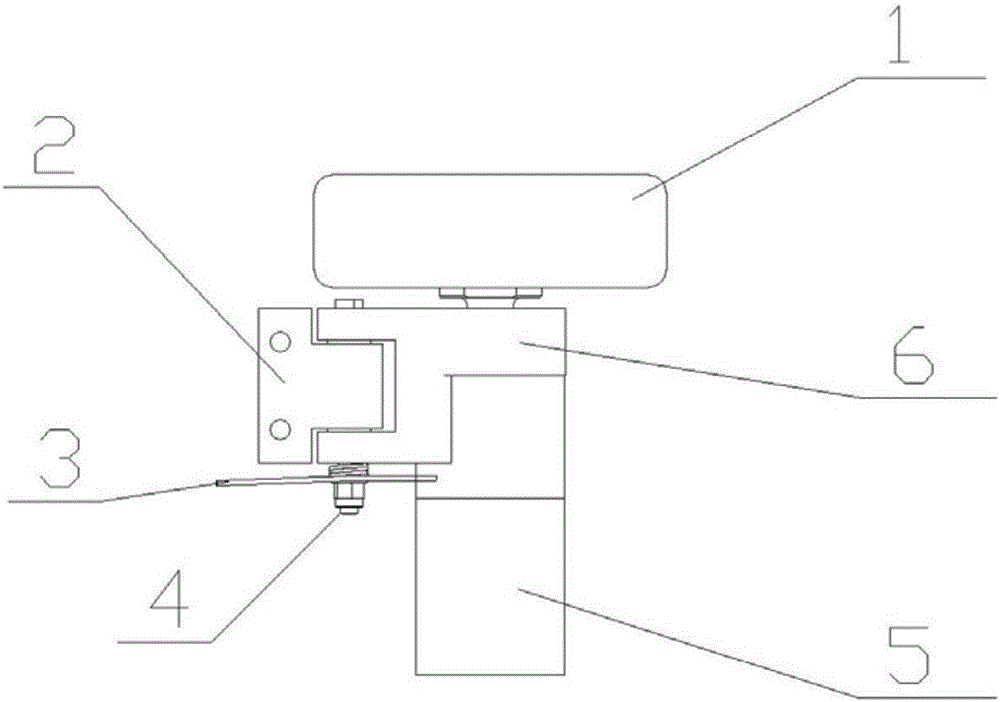
[0037] Suspension mechanism 101 comprises a suspension bracket 6, the driving wheel 1 that is movably connected with this suspension bracket 6, and the drive motor 5 that adopts direct connection mode to be connected with driving wheel 1; The suspension bracket 6 is provided with a rotating shaft parallel to the output shaft of the motor 4. The rotating shaft 4 is pierced with a suspension mount 2 fixedly connected to the bottom plate 102; the extended end of the rotating shaft 4 is provided with a torsion spring 3, and one end of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More