

Robot indoor positioning system and method
An indoor positioning and robot technology, which is applied in the direction of instruments, measuring devices, surveying and navigation, etc., can solve the problems of poor real-time performance, large amount of calculation, and easy to be disturbed by environmental changes, etc., and achieves fast speed, strong anti-interference ability, and balance Effects of Accuracy and Speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
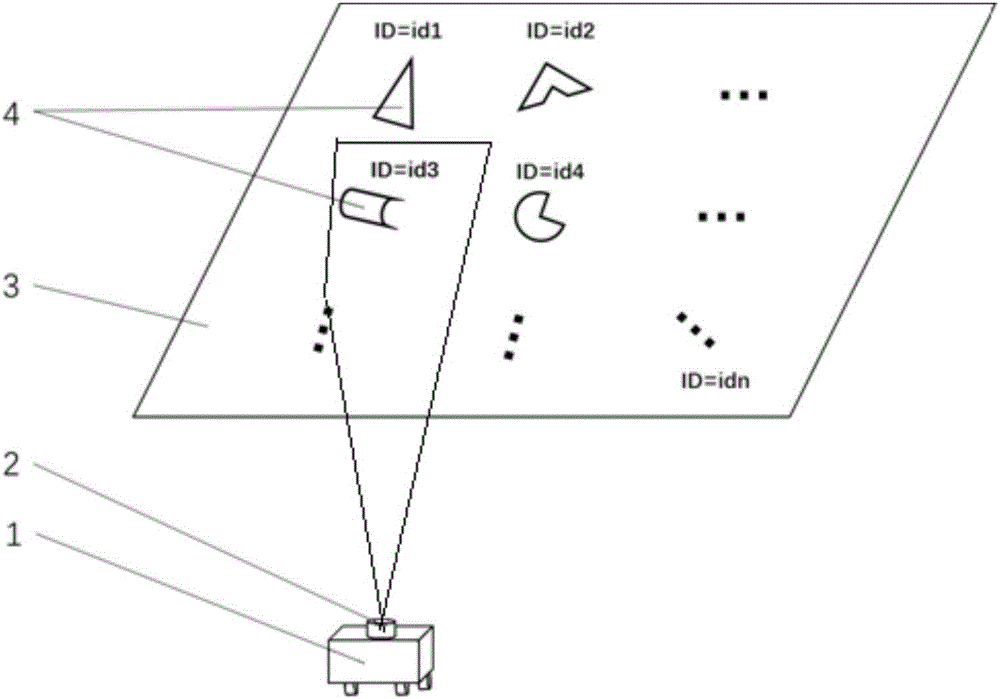
[0048] like figure 1 Shown is a schematic diagram of the robot indoor positioning system of the present invention. The robot indoor positioning system includes: a robot 1 and a ceiling 3 , the top of the robot 1 is provided with a vertically upward camera 2 , and a number of beacons 4 are arranged on the ceiling 3 .
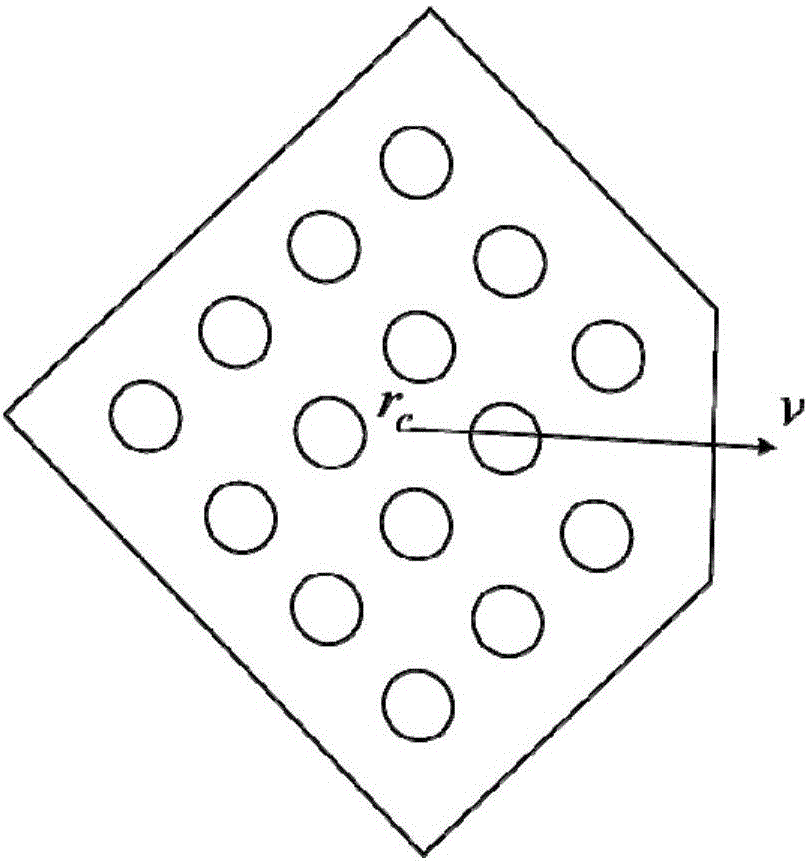
[0049] beacon 4 as figure 2 Shown as a square with one missing corner that makes the beacon directional. The different ID information possessed by the beacon is represented by the difference in the position and number of holes arranged thereon. For convenience, the center point r is used c and the direction of a vector v to characterize the position and orientation of the beacon, where r c is the center of the square beacon, v is the center point r c Point in the direction of the square notch. The position of the beacon is not required to be precise. According to the size of the indoor area, at least one beacon is set on the ceiling, and preferably, there is...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More