A mobile robot control method based on tensor product model transformation
A technology of mobile robot and model transformation, applied in the direction of non-electric variable control, two-dimensional position/channel control, control/regulation system, etc., can solve problems such as not considering constraints, achieve good real-time performance, ensure stability, Easy to handle effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
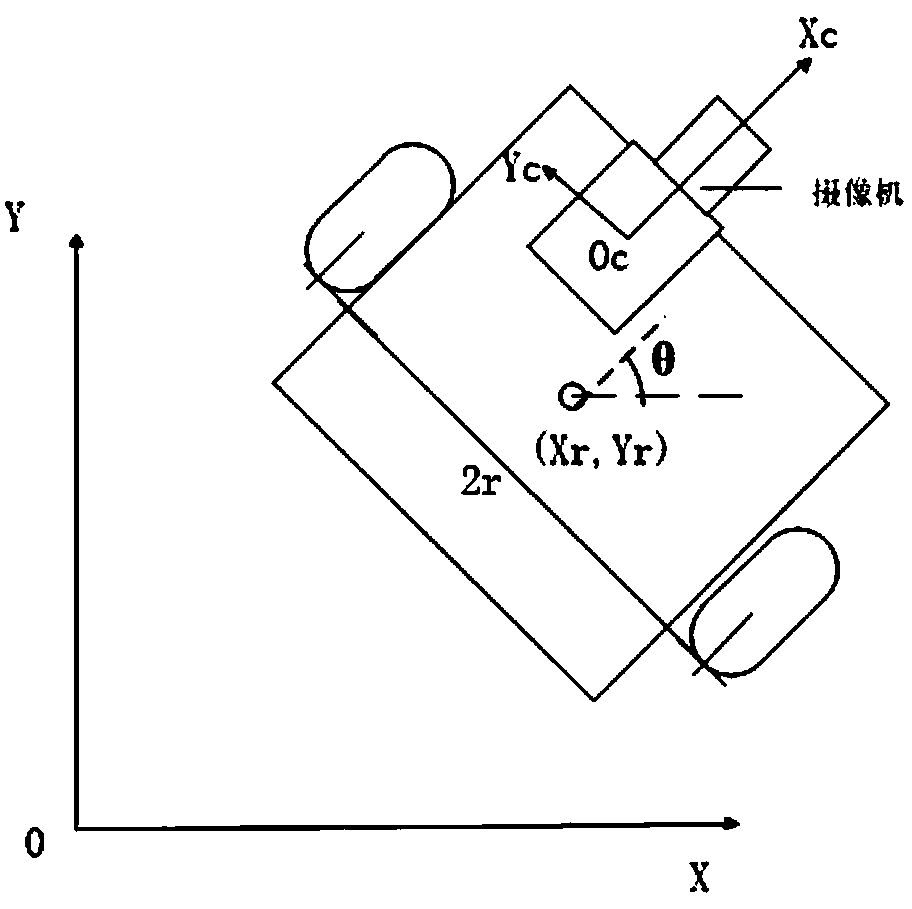
[0088] As attached figure 1 As shown, the motion model of the mobile robot is as follows:
[0089]
[0090] Define the pose vector of the robot in the world coordinate system as (x R ,y R ,θ R ] T , Where x R ,y R Is the coordinate value on the X and Y coordinate axes in the global coordinate space, that is, the position information of the robot, θ R Is the angle between the direction of the robot and the X axis, that is, the angle of the forward direction, ν R , Ω R These are the linear velocity and angular velocity of the robot.
[0091] Knowing that the distance between the centers of the left and right wheels of the robot is 2r, the movement of the robot is controlled by the left and right wheels differentially, the robot movement model relative to the speed of the left and right wheels is derived as:
[0092]
[0093] There are the following non-integrity constraints:
[0094]
[0095] Such as figure 1 As shown, assuming that there is only translation transformation between the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com