

Angle-controllable power differential omnidirectional wheel, and control method and omnidirectional moving platform thereof
An omnidirectional wheel and power technology, which is applied in the fields of machinery manufacturing and assembly and intelligent control, can solve the problems of complicated control of the mobile platform of the steering mechanism, limited application of the microphone wheel, etc., and achieves low cost, easy maintenance, and flexible movement. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The technical solution of the invention will be described in detail below in conjunction with the accompanying drawings.
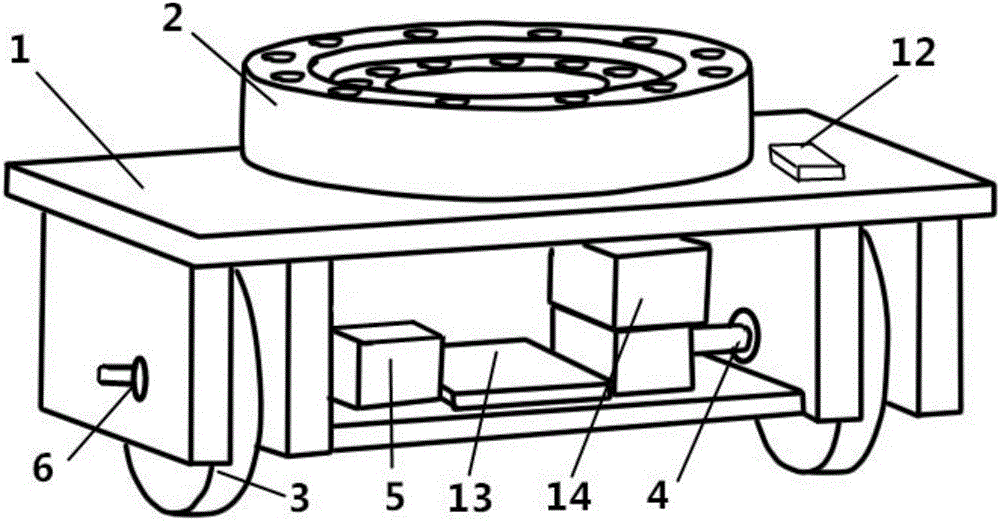
[0037] The angle controllable dynamic differential omnidirectional wheel that the present invention relates to is as figure 1 As shown, it includes: a wheel frame main body 1, a slewing support bearing 2, two wheels 3, two elastic couplings 4, two reduction motors 5, a gyroscope 12, and a controller 13. The wheel frame main body 1 comprises: a horizontal plate for bearing load, two vertical plates for fixing the wheels, two vertical plates for transmitting the loads of the omnidirectional wheels and load-bearing plates fixedly connected with them, each vertical plate It is fixedly connected with the horizontal plate, the inner ring of the slewing ring bearing 2 is fixed on the horizontal plate, one end of the axle of each wheel 3 is fixed on a vertical plate, and the other end of the axle of each wheel 3 passes through a piece for transmitting the o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More