

Robot suitable for long and narrow tunnel autonomous obstacle avoidance
A robot and tunnel technology, applied in the field of robots, can solve the problems of poor environmental adaptability of dragging cables, long and narrow tunnels, high-gain antennas, directional antennas are not suitable, etc., and achieve the effect of improving flexible control and autonomous obstacle avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
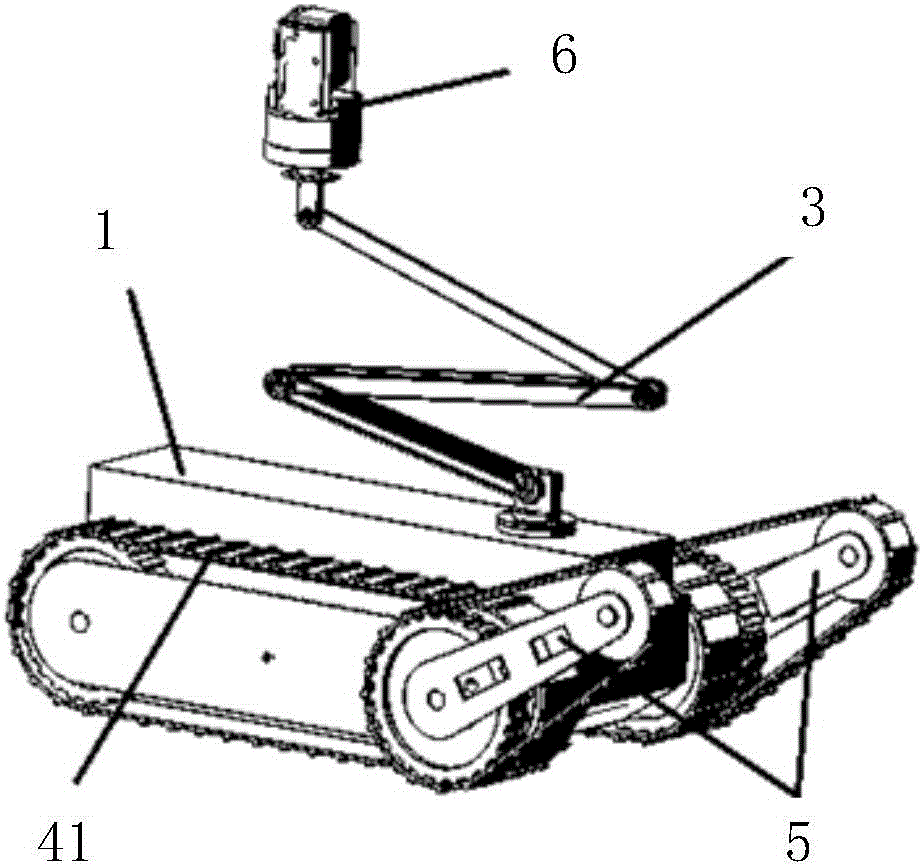
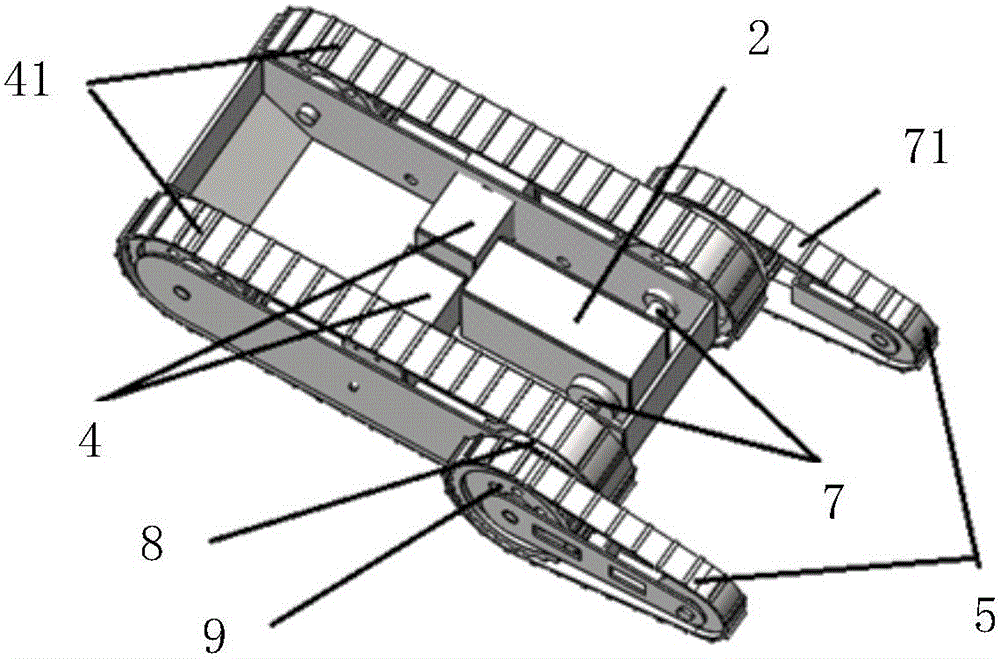
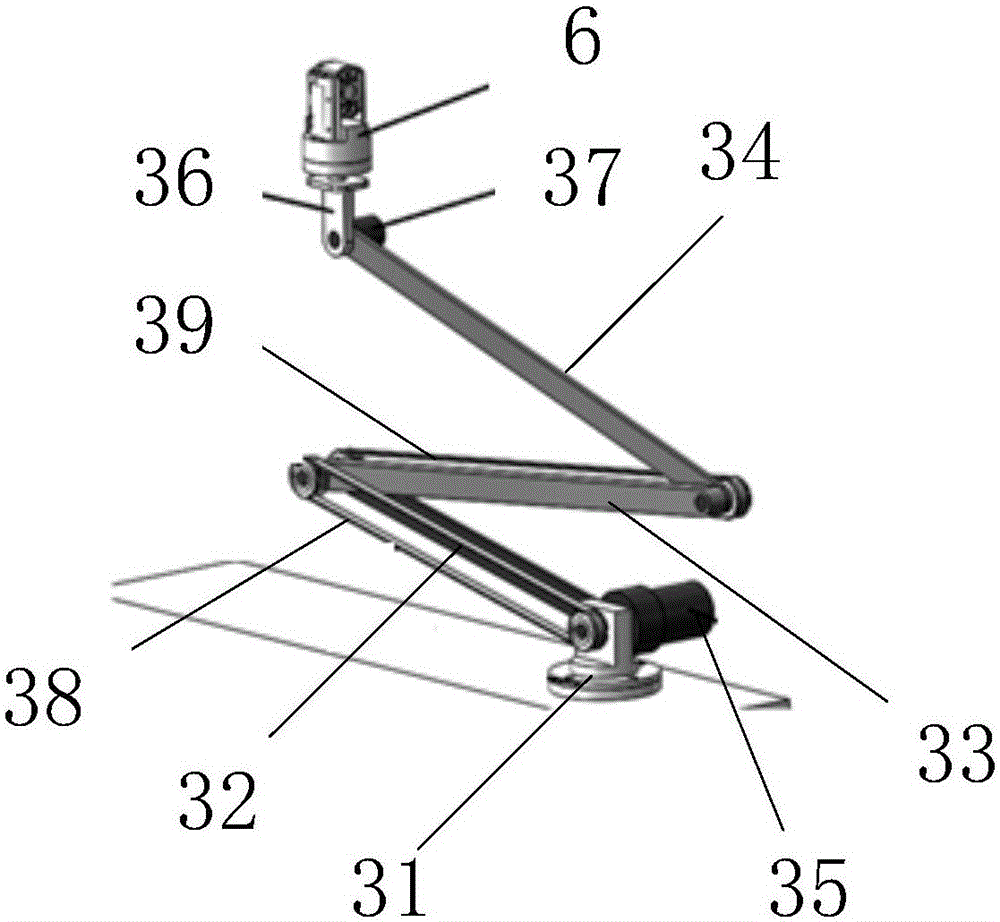
[0038] As shown in the figure, the robot suitable for autonomous obstacle avoidance in long and narrow tunnels provided by this embodiment includes a mobile chassis and a platform; Swing arm 5; the cloud platform includes linkage folding arm 3 and camera 6;
[0039] The two sides of the car body are respectively provided with walking crawlers; the car body is provided with a linkage folding arm; the upper end of the linkage folding arm is provided with a camera; the two sides of the front end of the car body are respectively provided with front swing arms;
[0040] The walking crawler belt on one side of the car body and the swing arm crawler belt 71 are driven by a walking motor located on the same side; the swing arm motor is arranged at the front end of the car body; The crawler driving wheels 8 on both sides of the front end of the car body are connected; the crawler driving wheels 8 on both sides of the car body and the swing arm driving wheels 9 are respectively coaxiall...
Embodiment 2
[0054] The robot suitable for autonomous obstacle avoidance in narrow and long tunnels provided in this embodiment improves the flexible control and autonomous obstacle avoidance capabilities of tunnel robots in the environment of narrow and long tunnels. Raspberry Pi assisted the control system of image processing and signal processing, and applied it to the tunnel robot. The design of the control system solves the control problems such as poor communication, unclear image transmission, and inability to autonomous barriers in the complex environment of the tunnel. At the same time, it solves the problem that people can operate and inspect away from the tunnel environment. It provides a control scheme for the traditional cable tunnel to realize robot inspection without modification.
[0055] Narrow, non-directional and multiple wall obstacles are the difficulties that the robot control in the tunnel environment cannot overcome for a long time; therefore, for the communication ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More