

Parameter Adaptive Densification Method for Robot Nurbs Curve Motion Interpolation
A curved motion and self-adaptive technology, applied in manipulators, program-controlled manipulators, two-dimensional position/lane control, etc., can solve the problems of smooth motion and low motion precision, long deceleration distance, and inability to fully guarantee the compliance of the acceleration process And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0094] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
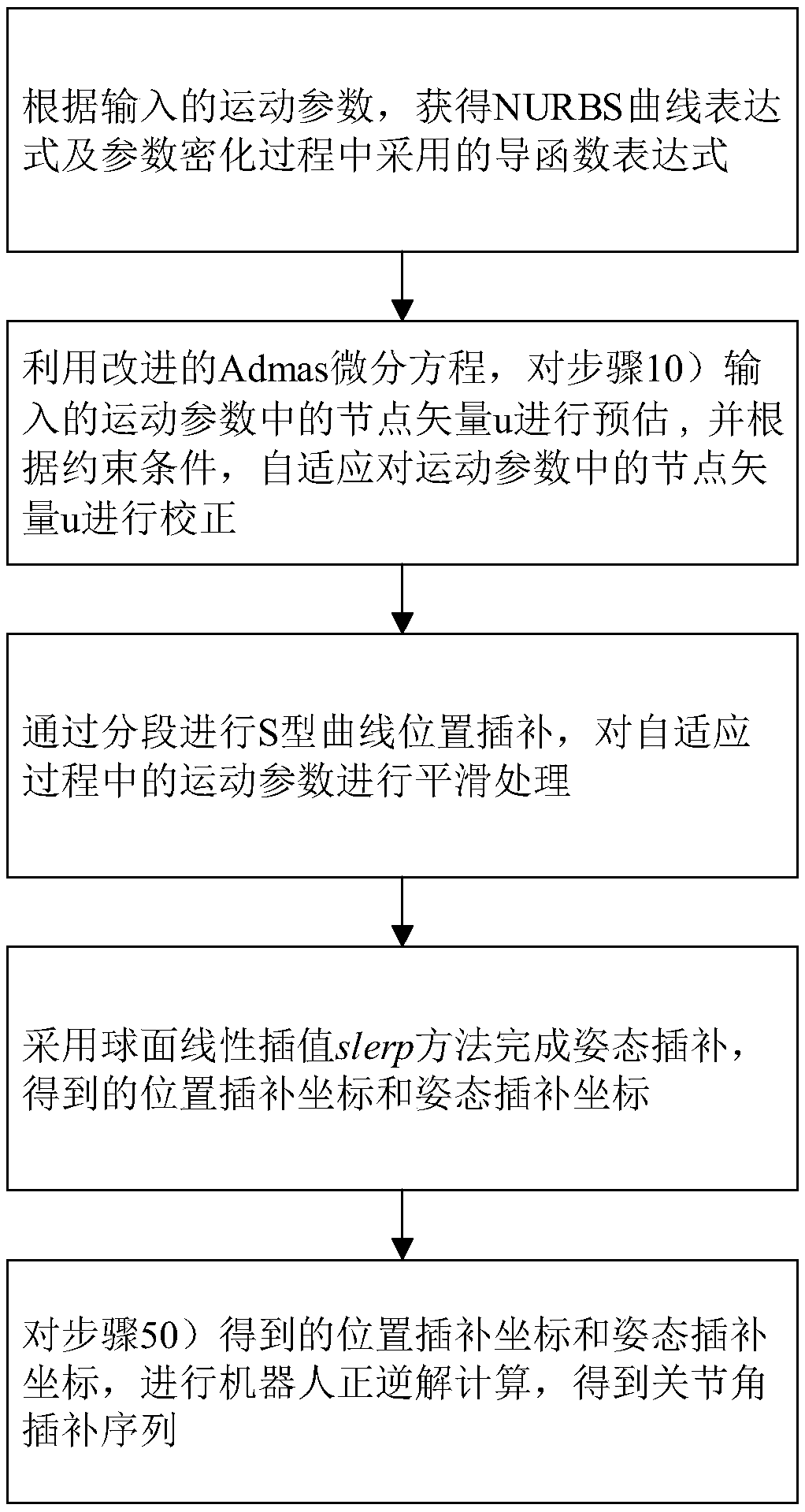
[0095] like figure 1As shown, a kind of parameter self-adaptive densification robot NURBS curve motion interpolation method of the present invention comprises the following steps:
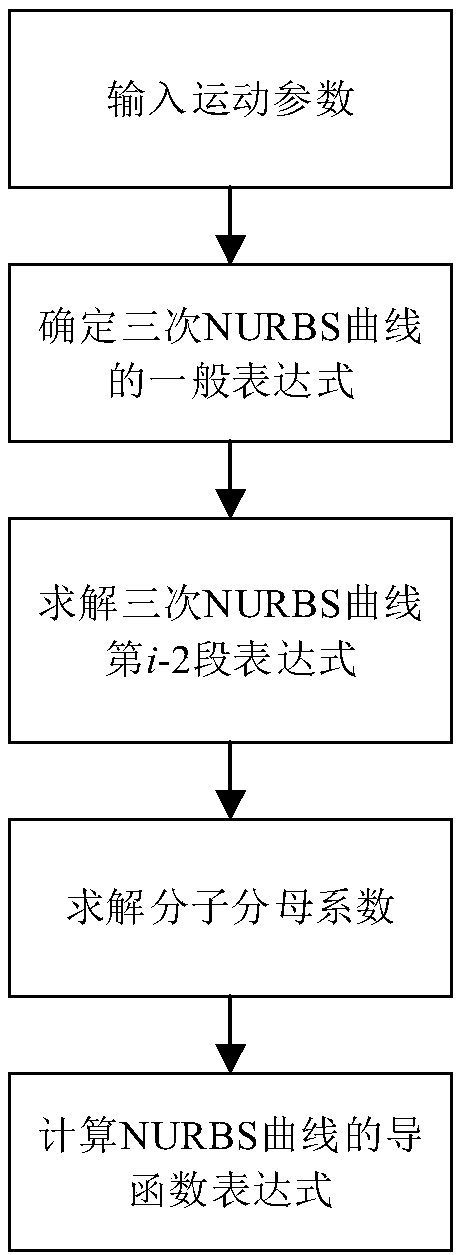
[0096] Step 10) Obtain the NURBS curve expression and the derivative function expression used in the parameter densification process according to the input motion parameters.
[0097] Step 10) first determine the expression form of the cubic NURBS curve according to the given NURBS control vertices and their weights, node vectors and other parameters; secondly select a reasonable time interval to determine the expression of each section of the NURBS curve; then solve each section of NURBS The numerator and denominator coefficients of the curve; finally, on the basis of the NURBS curve expression, the first-order and second-order derivative function expressions of t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More