

A Cartesian Impedance Control Method of Superimposed Oscillating Force for Robot Assembly
A technology of superimposed oscillation and impedance control, which is applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., can solve small-scale errors in assembly gaps and blockages in the end-disturbance assembly process, reduce the success rate of autonomous assembly, and its robustness and reliability are not as good as and other problems, to achieve the effect of solving flexibility problems, assembling supplely and avoiding blockage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
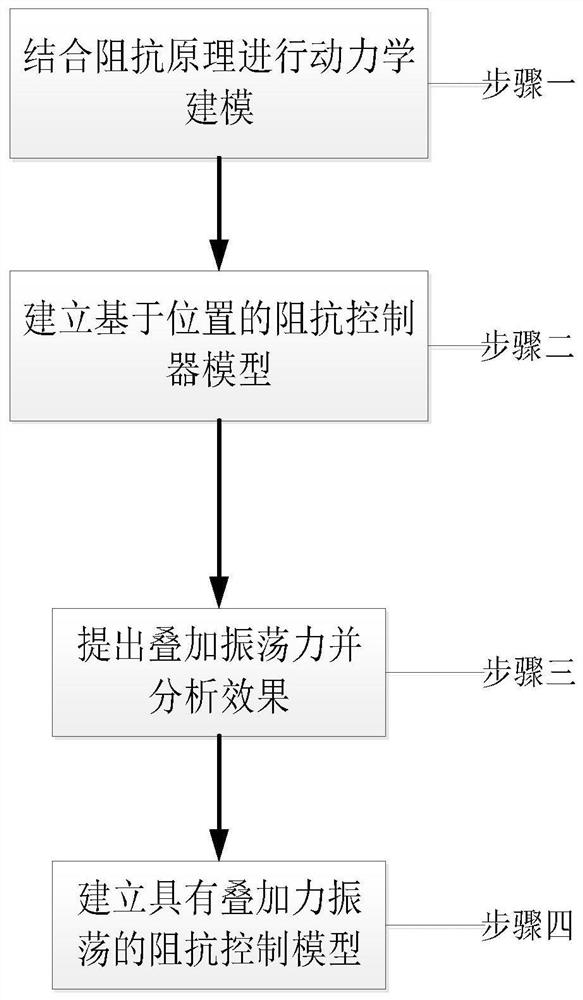
[0039] combine figure 1 This embodiment method will be specifically described. The method of the present invention describes a Cartesian impedance control method for superimposed oscillation force for robot assembly aimed at the insertion stage of the small-gap high-precision assembly task of the manipulator, including the following steps:
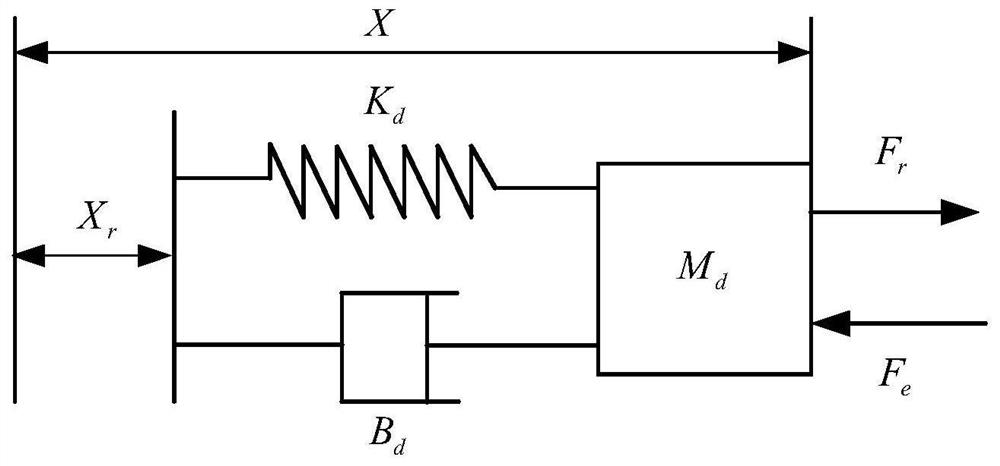
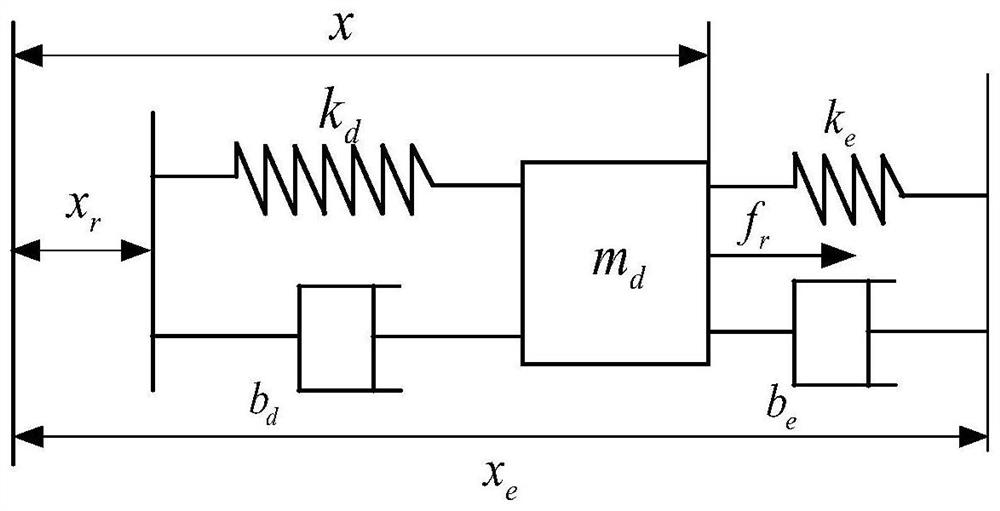
[0040] Step 1. For the insertion stage of assembly components, dynamic modeling is carried out in combination with the pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More