

Vehicle self-positioning method based on street view image database
An autonomous positioning and database technology, applied in electrical digital data processing, special data processing applications, photo interpretation and other directions, can solve the problems of consuming large hardware equipment, unable to be used for a long time, and not suitable for long-distance use of accumulated errors, etc. The effect of improving operating efficiency, low cost and strong practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
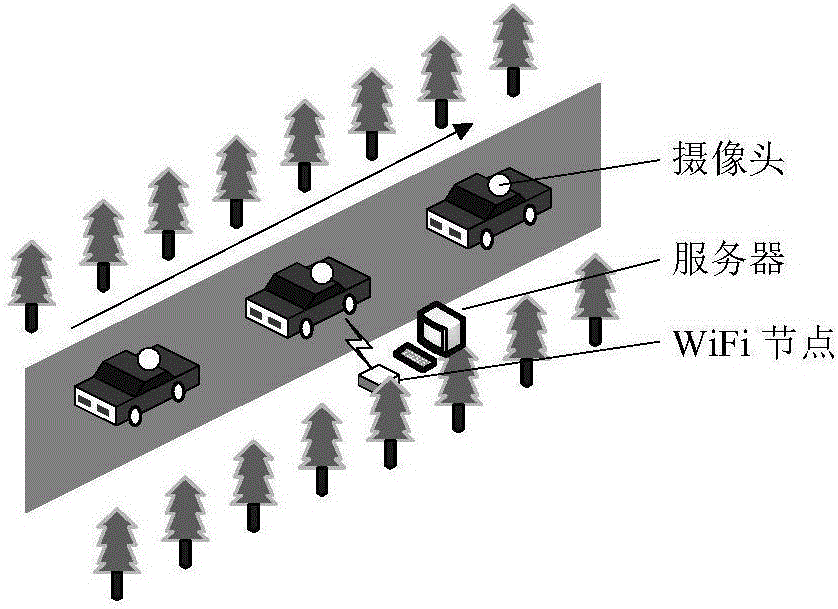
[0096] The experimental environment is: this test uses BYD Surui C4 to collect data at a speed of 3km / h on a straight road (due to occlusion, GPS signal is poor), and the Blaser-acA1600 camera is installed on the roof, such as Figure 6 shown. The image sequence is recorded synchronously through an external trigger signal, with a speed of 30frame / s and a resolution of 1600×1200pixels. The operating platform is Windows XP system, 2.85GHz CPU and MATLAB R2009a.
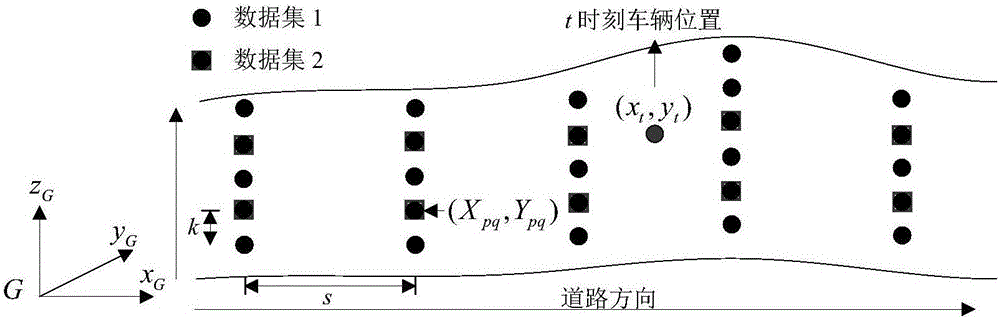
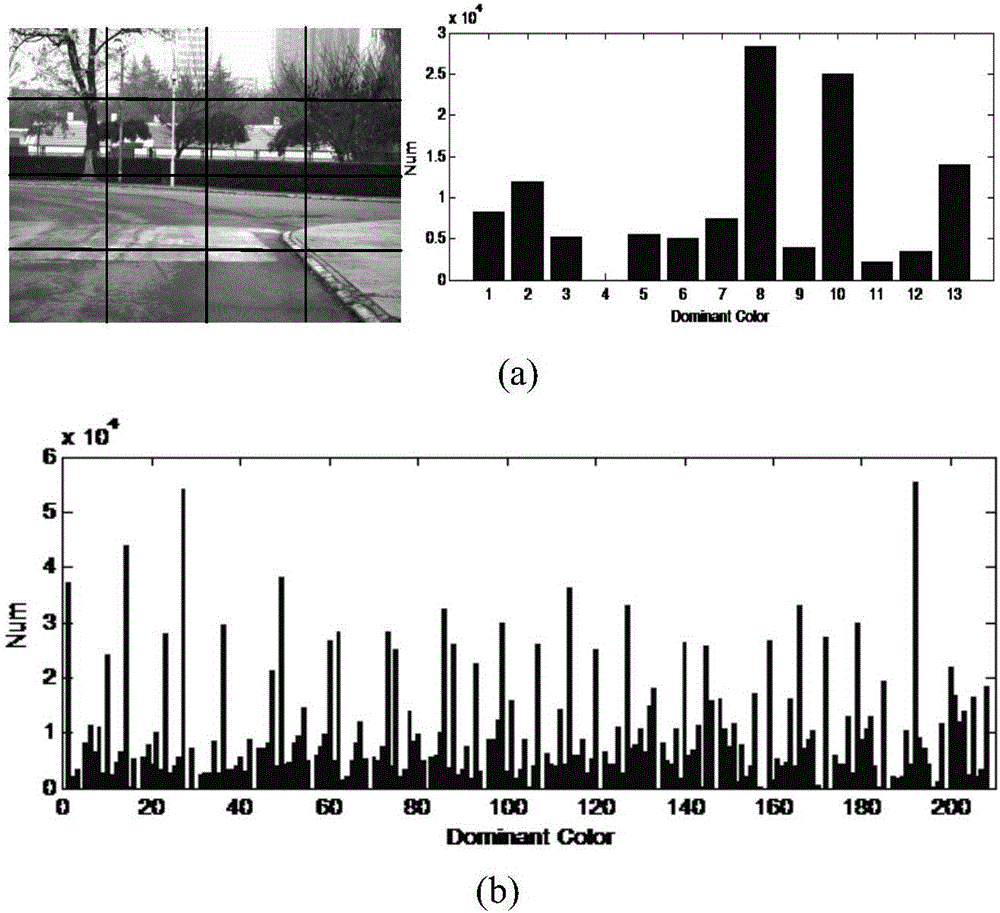
[0097] When constructing a database, we set k=1.5m and s=3m. In a certain section, 625 shooting nodes are selected. At each collection point, the vehicle vertically shoots the front scene to form a data set, some images such as Figure 7 As shown in Fig. 1, the images taken with 286 collection points are selected and stored in Dataset 2. Main color feature information and SURF feature points have been pre-stored in the database. An image taken at a certain moment, its main color features are as follows: Figure 8 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More