

Automatic focusing method and system based on RGB-IR depth camera
A technology of auto-focus and depth camera, which is applied to TV system parts, color TV parts, TV, etc. It can solve the problems of large amount of calculation and cannot auto-focus, achieve fast auto-focus, increase speed, and reduce calculation amount Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
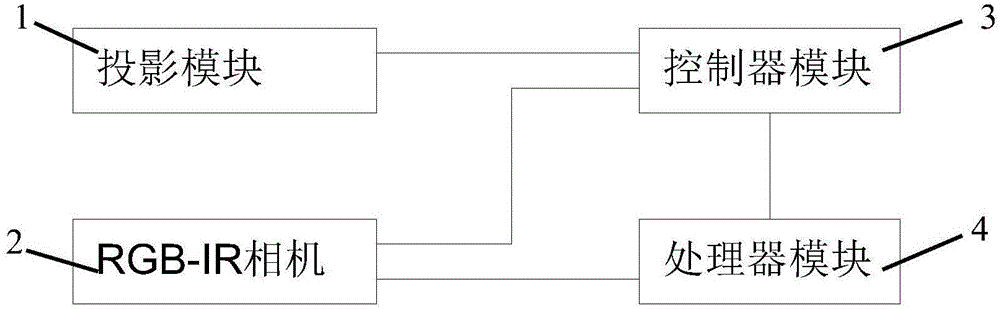
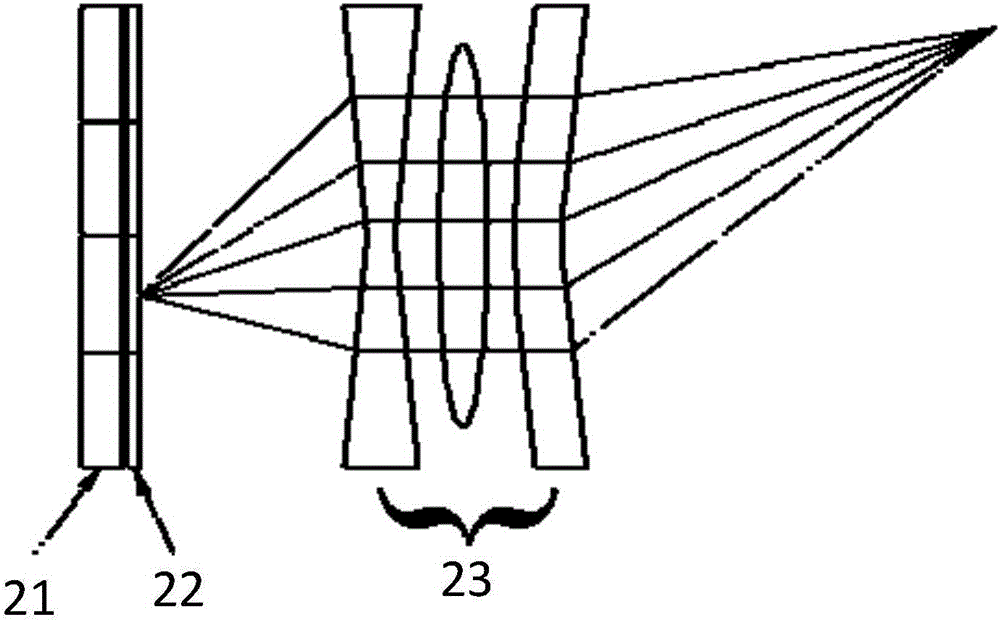
[0043] This embodiment proposes an autofocus system based on an RGB-IR depth camera, and the RGB-IR camera can simultaneously acquire visible light (RGB image) data and infrared light data. like figure 1 As shown, the projection module 1, the RGB-IR camera 2, the processor module 4 and the controller module 3, the projection module 1 is used to project the encoded infrared structured light pattern to the target space; the RGB-IR camera 2 is used to acquire the focus synchronously The structured light infrared image of area 5 and the RGB image of the target area, the depth camera unit and the zoom camera unit respectively obtain the depth image and the RGB image of the focus area 5; the processor unit is used to obtain the focus area 5 and the focus area in the RGB image 5 depth information; the controller module 3 is used to automatically focus the RGB-IR camera 2 according to the depth information; as image 3 As shown, the RGB-IR camera 2 includes an image sensor 21, a filt...
Embodiment 2
[0053] In this example, if Image 6 As shown, according to the autofocus system based on the RGB-IR depth camera proposed in Embodiment 1, an autofocus method based on the RGB-IR depth camera is proposed. This embodiment is mainly used for single-point focusing, and can refer to the optical path Figure 8 .
[0054] Firstly, S1, using the projection module 1 to project the coded infrared structured light pattern to the target space;
[0055] The projection module 1 has different structures according to different projection structures. This embodiment uses speckle granular structured light as an example for illustration. The projection module 1 generally consists of an infrared light source, a collimator lens and a diffractive optical element (DOE). The light source is an infrared laser, which can be a single edge emitting laser light source or a vertical cavity surface emitting laser array light source. Since the light emitted by the laser light source has a certain diverg...
Embodiment 3
[0069] In this example, if Figure 7 As shown, according to the auto-focus system based on the depth camera proposed in the first embodiment, an auto-focus method based on the RGB-IR depth camera is proposed. The difference between this embodiment and the second embodiment is that this embodiment is mainly for multi-point focus.
[0070] Firstly, S1, using the projection module 1 to project the coded infrared structured light pattern to the target space;
[0071] The projection module 1 has different structures according to different projection structures. This embodiment uses speckle granular structured light as an example for illustration. The projection module 1 generally consists of an infrared light source, a collimator lens and a diffractive optical element (DOE). The light source is an infrared laser, which can be a single edge emitting laser light source or a vertical cavity surface emitting laser array light source. Since the light emitted by the laser light sourc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More