

Path programming method based on A* algorithm capable of searching continuous neighborhoods
A path planning and algorithm technology, which is applied in navigation computing tools, measuring devices, instruments, etc., can solve problems such as local minimum calculation amount, and achieve the effects of shortening UUV paths, saving time, and improving accuracy
Active Publication Date: 2017-02-22
HARBIN ENG UNIV
View PDF3 Cites 51 Cited by
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Traditional path planning algorithms, such as artificial potential field method, graph search method, particle swarm algorithm, etc., mostly have some shortcomings, such as easy to fall into local minimum and large amount of calculation
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View moreImage
Smart Image Click on the blue labels to locate them in the text.
Smart ImageViewing Examples

Examples
Experimental program
Comparison scheme
Effect test
specific example
[0063] The UUV sails from the starting point (10, 10) to the ending point (80, 80), the starting heading is 45°, and multiple obstacles O 1 ,O 2 .... Use the formula (1) to get the area of the obstacle, use the formula (2) to get the size of the grid, use the formula (3) to get the evaluation function. Then, use the evaluation function of the searchable continuous neighborhood A* algorithm to find the node with the smallest evaluation function in the searchable continuous neighborhood, and use it as the next waypoint to realize UUV route planning step by step. Simulation trajectory such as Figure 5 shown.
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More PUM
 Login to View More
Login to View More Abstract
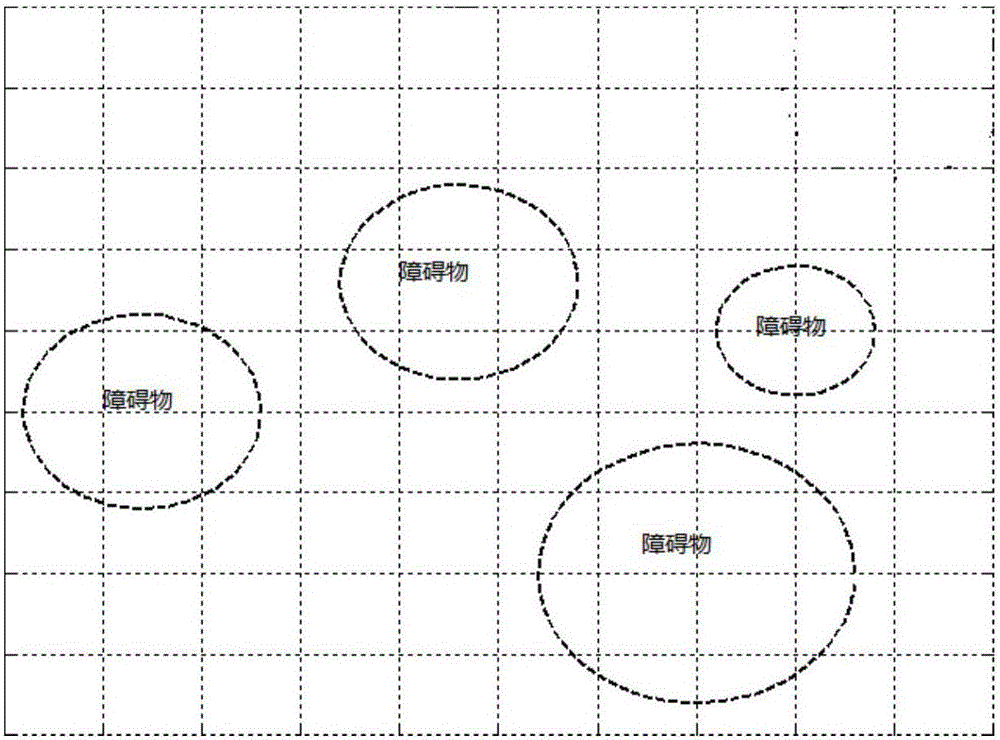
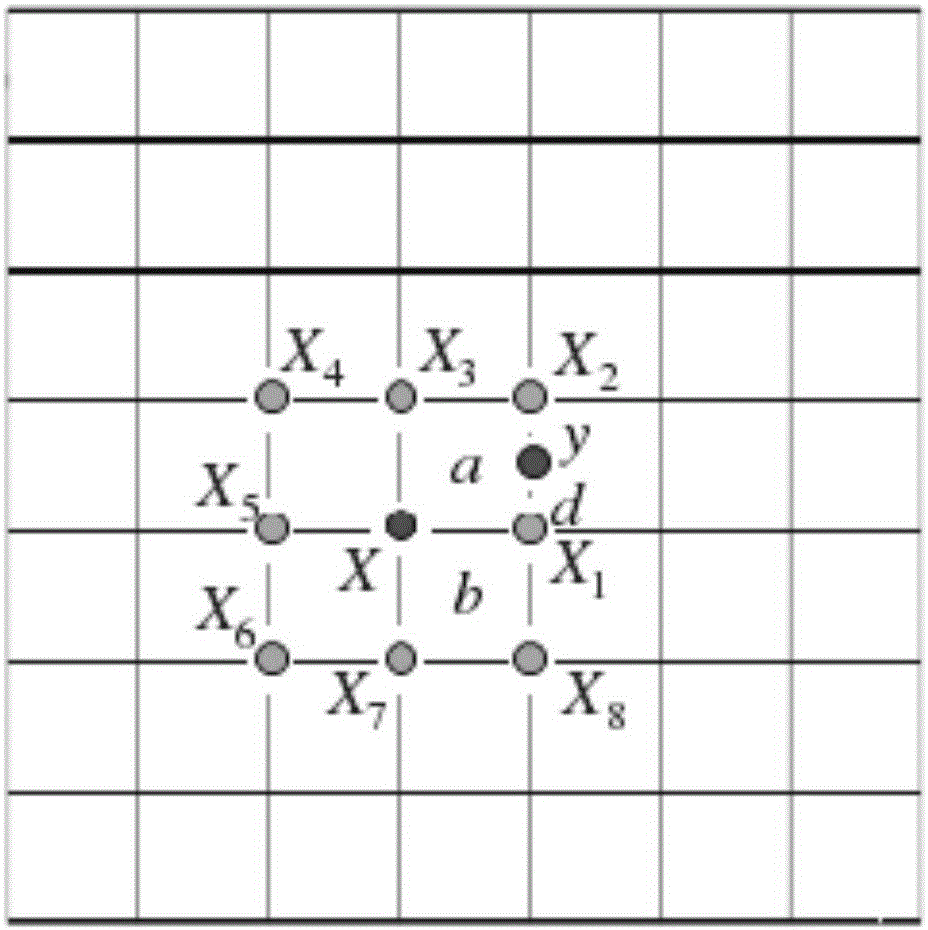
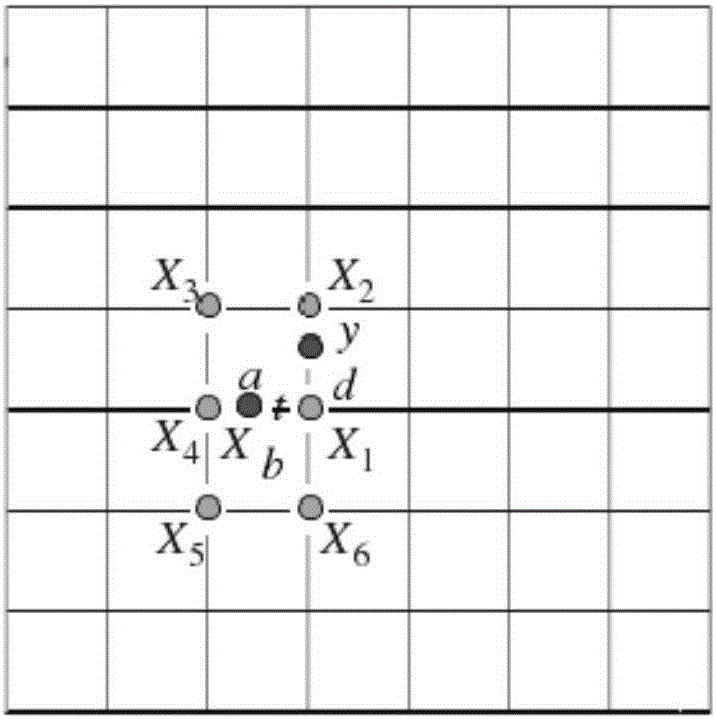
The invention provides a path programming method based on an A* algorithm capable of searching continuous neighborhoods. The path programming method comprises the following steps: establishing an environment model by using a grid method according to the geometrical size of an existing barrier, and treating a circular barrier by considering UUV as a mass point, taking the maximum width of the barrier as a diameter and taking the center of gravity of the barrier as the original point; acquiring the grid size l according to the information of the barrier; determining an evaluation function f (x) of the A* algorithm according to an established grid map; determining evaluation cost h(y) of an optional point y according to features of neighborhoods and the A* algorithm; and finding out a node of the minimum evaluation function fmin of the neighborhoods according to the evaluation function of the A* algorithm capable of searching the continuous neighborhoods as a next way point, and implementing a UUV sea route plan step by step. By the path programming method based on the A* algorithm capable of searching continuous neighborhoods, the problem that an existing UUV path planning method has path smoothness difference and a non-shortest path in a global environment is solved.
Description
technical field [0001] The invention relates to a UUV global path planning method. Background technique [0002] As a high-tech means, unmanned underwater vehicle (UUV) plays a vital role in the ocean, which is a valuable development space in the future, and path planning is the key to autonomous underwater vehicles. One of the key technologies is an important guarantee for autonomous underwater vehicles to travel safely and effectively in their environment and successfully complete given tasks. [0003] The essence of UUV global path planning is to find an optimal or feasible path from the starting point to the target point within the planning area under given obstacles and constraints. Traditional path planning algorithms, such as artificial potential field method, graph search method, particle swarm algorithm, etc., mostly have some shortcomings, such as easy to fall into local minimum and large amount of calculation. On the basis of environment modeling with the grid m...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More Application Information
Patent Timeline
 Login to View More
Login to View More IPC IPC(8): G01C21/20
CPCG01C21/203
Inventor张伟王秀芳陈涛滕延斌李娟严浙平
OwnerHARBIN ENG UNIV