

Implementation method of automatic gyro drift compensation of two-axis four-frame photoelectric pod
A photoelectric pod and gyro drifting technology, applied in the direction of measuring devices, instruments, etc., can solve the problems of long time consumption, poor compensation accuracy, and cost, and achieve the effect of fast compensation speed and high compensation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
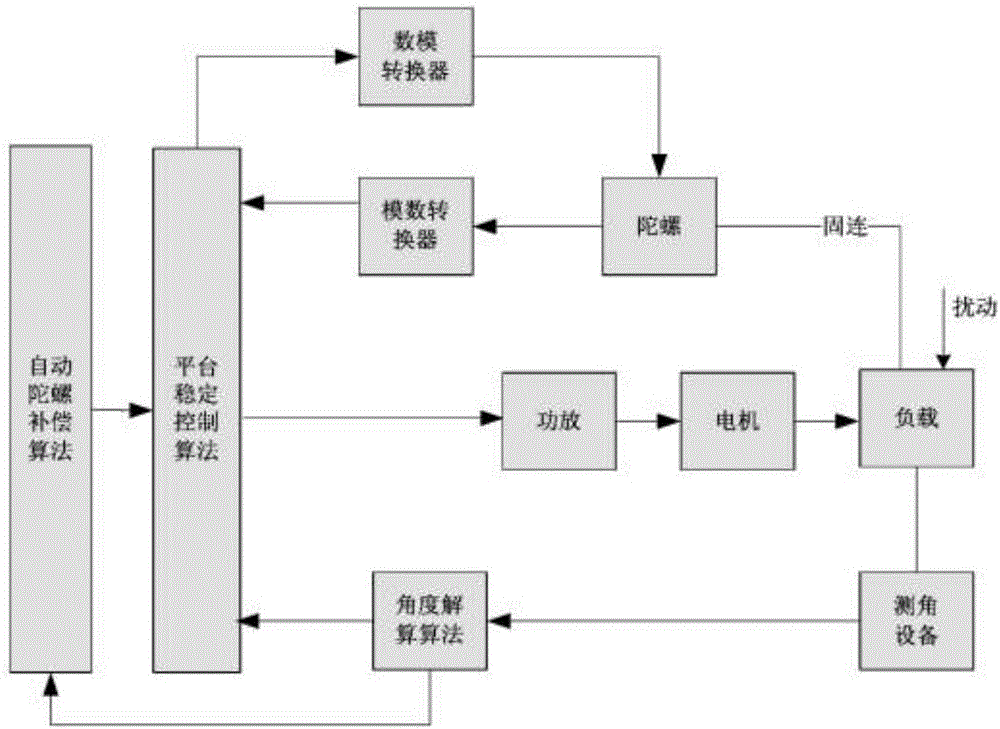
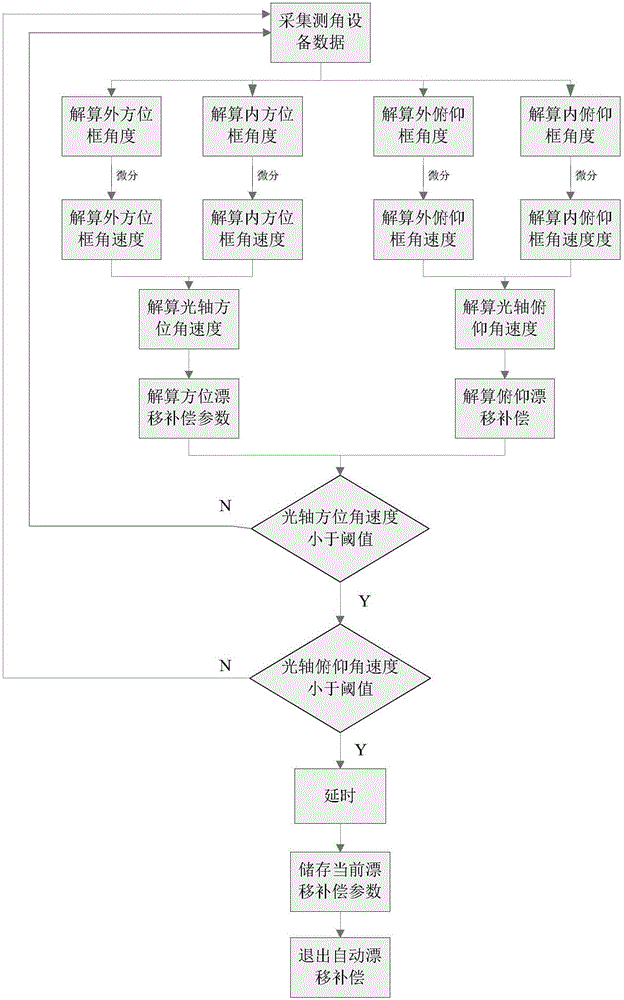
[0021] The two-axis four-frame photoelectric pod has two frames, the outer frame and the inner frame, on each axis of the azimuth and pitch. After the photoelectric pod is started and self-inspected, the pod is kept still. At this time, the angle measuring equipment is continuously collected. The angles of the outer frame and the inner frame on the two axes of azimuth and pitch are calculated by differentially calculating the angular velocity of the outer frame of the pod relative to the pod on the two axis systems.
[0022] Let the angular velocity of the pod relative to the inertial space on a shaft system be ω pod , the angular velocity of the outer frame of the pod relative to the pod is ω o , the angular velocity of the inner frame of the pod relative to the pod is ω i , the angular velocity of the pod optical axis on the corresponding shaft system is ω a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More