

Near space vehicle preset performance attitude tracking control method with input nonlinearity
A near-space vehicle, preset performance technology, applied in attitude control, adaptive control, general control system, etc., can solve problems such as external disturbance, parameter uncertainty, affecting system performance, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0109] The present invention will be further described below in conjunction with the accompanying drawings.
[0110] The attitude tracking control method of the near-space aircraft with preset performance of input nonlinearity of the present invention comprises the following steps:
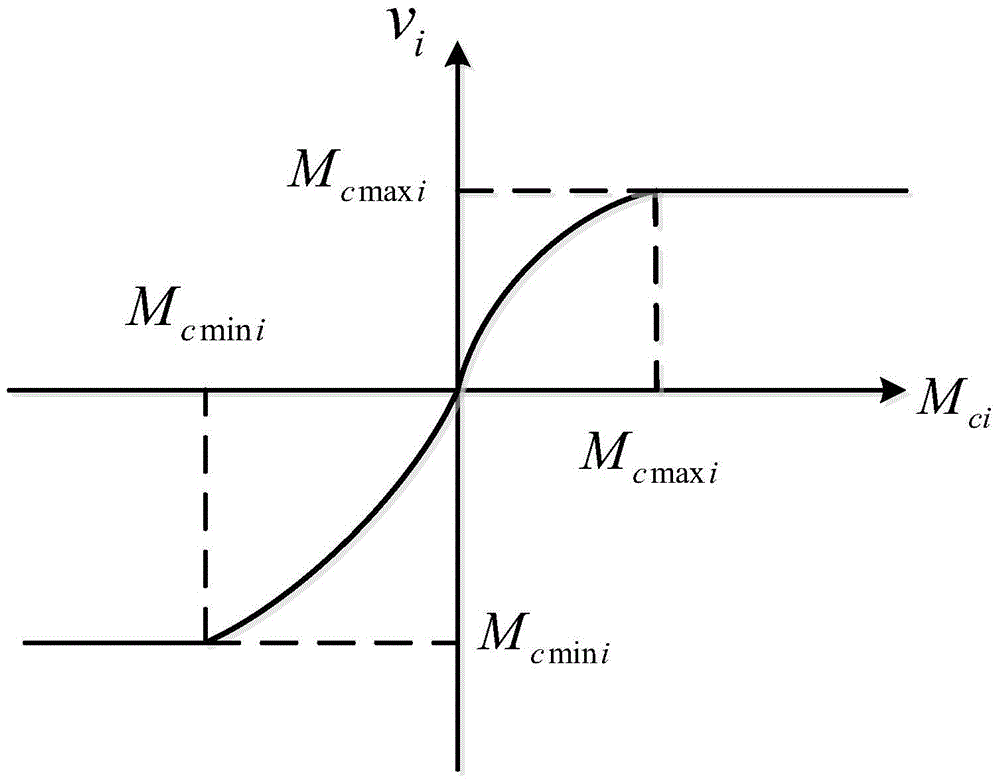
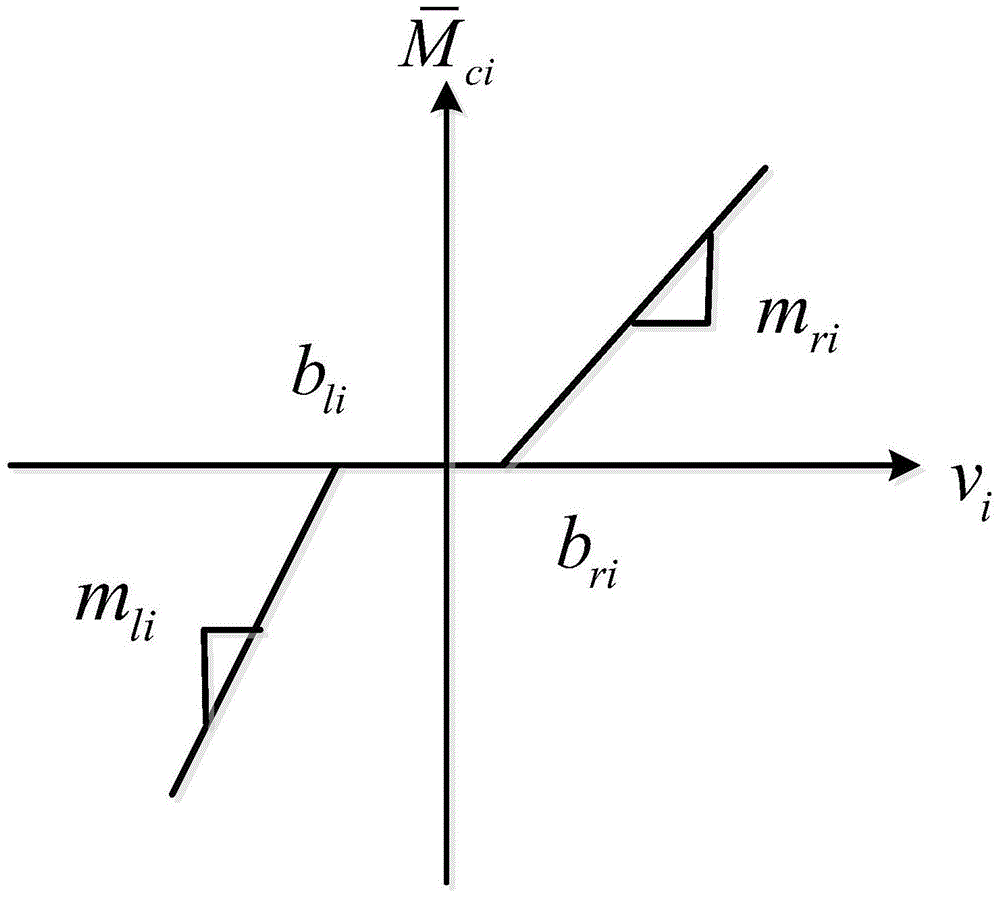
[0111] Step 1. By adding the right inverse function of the dead zone, the input nonlinear link including the dead zone and input saturation is equivalent to the input saturation link, and the input nonlinear is added to the NSV attitude model;
[0112] Step 2. Introduce the preset performance limit of the tracking error, adjust the transient performance and steady-state error of the tracking error signal at the same time, and convert the tracking error signal subject to the preset performance constraint into an unconstrained conversion by means of the error conversion function error signal;
[0113] Step 3. Construct an auxiliary system to reduce or eliminate the influence of input nonlinearity o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More