

Aquatic robot intelligent constant-speed cruising control method and system
A robot intelligent, fixed-speed cruise technology, applied in the field of robots, can solve the problems of cruise speed deviation, autonomous cruise can not control the direction, inconvenient operation, etc., to achieve the effect of adjustable speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] In order to express the object, technical solution and advantages of the present invention more clearly, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific implementation cases.
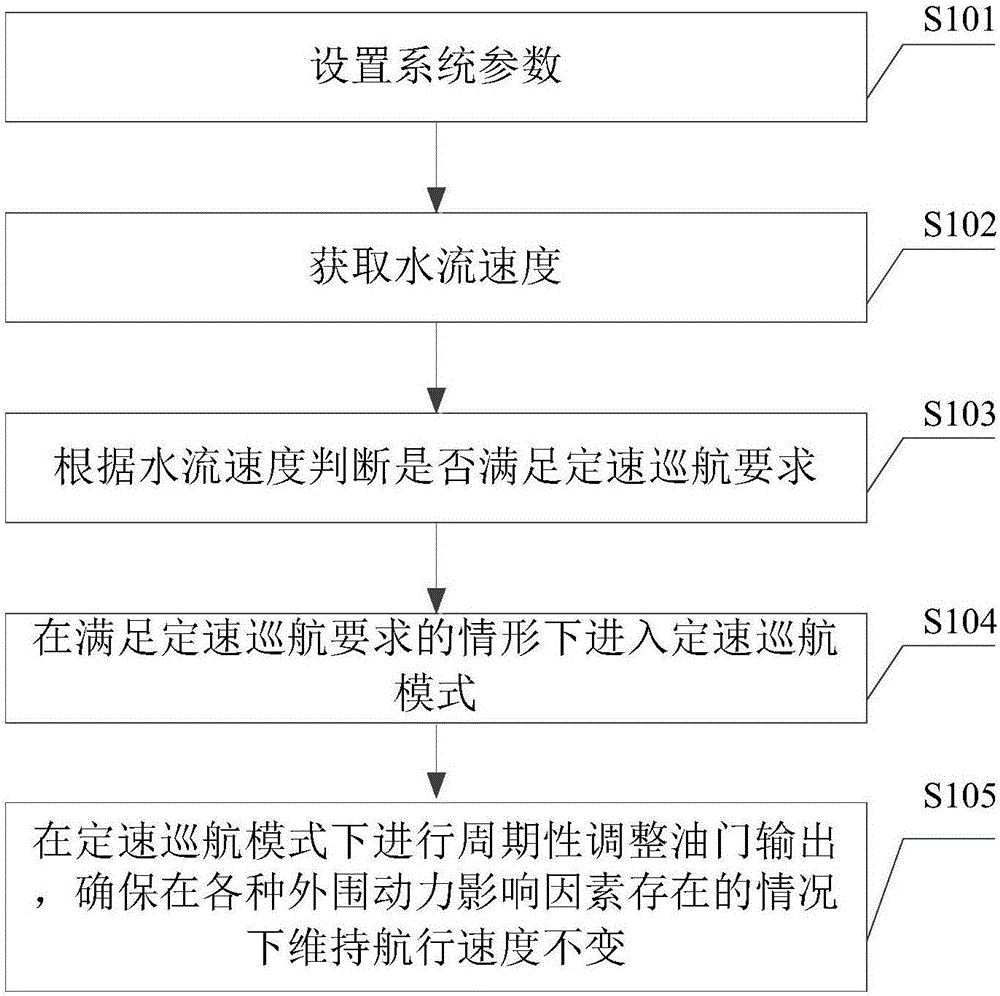
[0025] The water robot intelligent fixed-speed cruise control method of the present invention, such as figure 1 shown, including
[0026] S101. Setting system parameters; including setting power parameters such as target cruising speed and maximum cornering throttle gain.
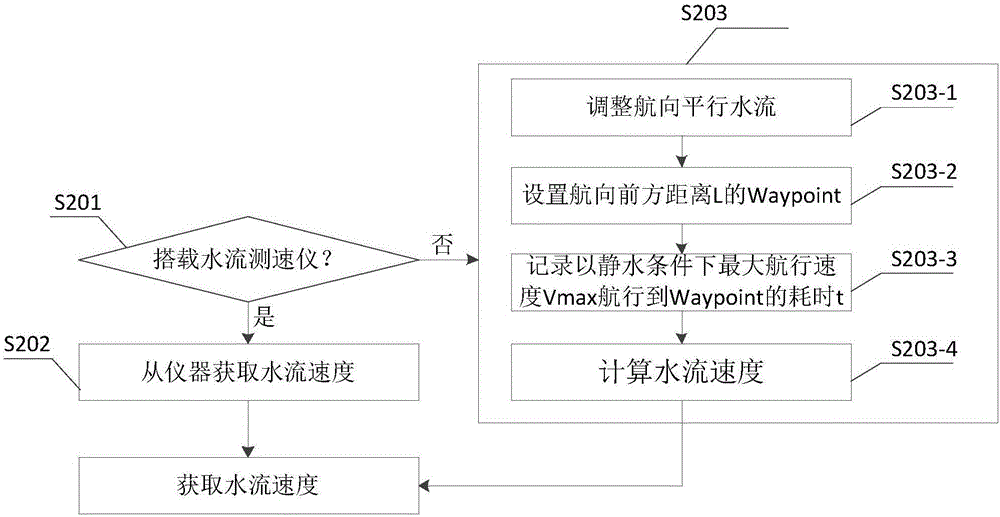
[0027] S102. Obtain the water flow velocity;
[0028] S103. Judging whether the cruise control requirements are met according to the water flow speed; if the requirements are not met, perform the nearest and fastest return to intelligent protection;
[0029] S104. Entering the cruise control mode under the condition that the cruise control requirements are met;
[0030] S105. Periodically adjust the throttle output in the constant speed cruise mode t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More