

A quadrotor attitude control method based on a T-S fuzzy model
A technology of attitude control and fuzzy model, applied in the field of unmanned aerial vehicles, can solve problems such as difficult control effect of the controller, difficult channel coupling problem, complex state coupling relationship, etc., and achieve simple structure, satisfying convergence speed, and strong nonlinearity sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
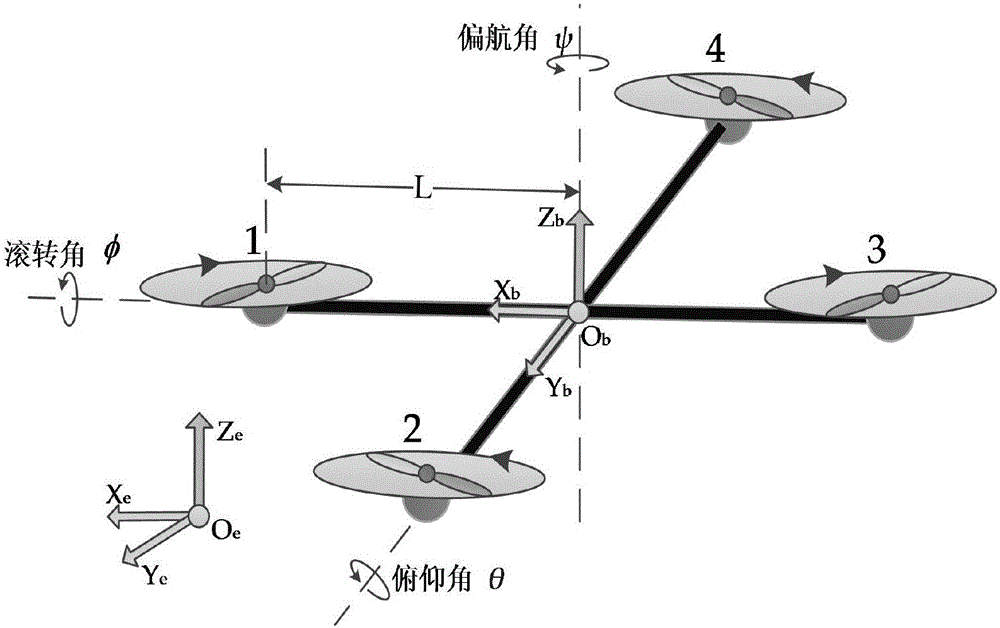
[0074] 1) Follow figure 2 As shown in the hardware platform, here we choose a quad-rotor drone with a "+" structure. The No. 1 propeller is the front, the No. 3 propeller is the rear, the left propeller is No. 2, and the right propeller is No. 4. And the No. 1 and No. 3 propellers rotate clockwise, and the No. 2 and No. 4 propellers rotate counterclockwise. According to the structure of the quadrotor, the corresponding power distribution method can be obtained. Because the electronic speed governor can control the rotation of the motor, and ensure that the input PMW signal is in a linear relationship with the lift and torque generated by the electricity. After measurement, we can get the proportional coefficient K between the PWM signal and the lift f , Each and torque proportional coefficient K τ , And then we can get the following relationship
[0075]
[0076] Where τ=(τ ψ ,τ θ ,τ φ ) T Is the output torque of the attitude controller, P 1 ,P 2 ,P 3 ,P 4 It is the PWM co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More