

Automatic registration fusion method of point cloud data and optical image based on line feature
An optical image and point cloud data technology, applied in the field of improved heterologous image registration algorithm, can solve the problems of relying on three-dimensional reconstruction accuracy, high algorithm complexity, reduced matching features, etc., achieving a high degree of automation and robustness Good, the effect of reducing the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
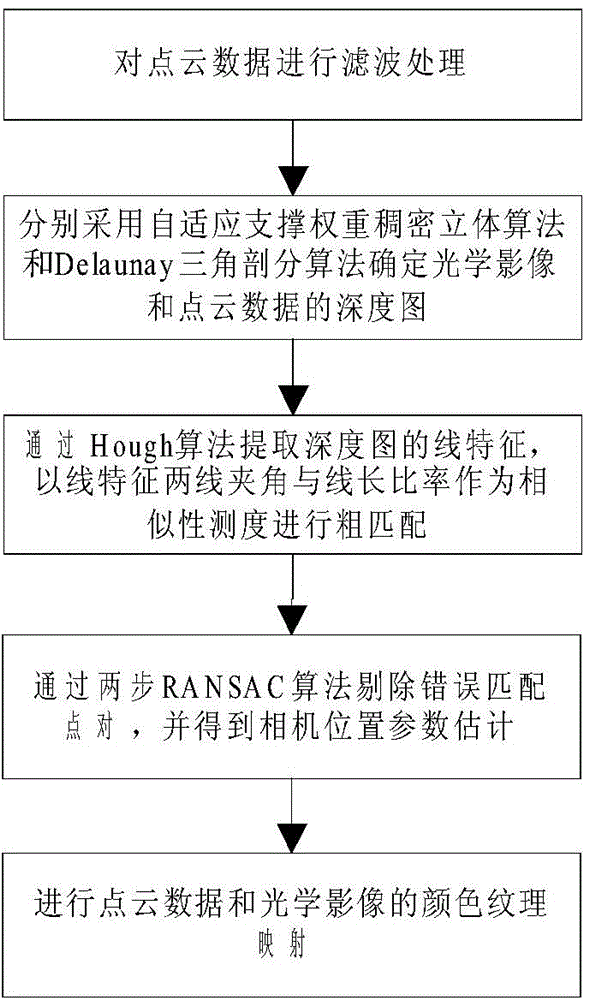
[0076] This embodiment uses airborne LiDAR point cloud data and optical images, which mainly cover some central areas, including main buildings, low jungles, etc., and selects some airborne LiDAR point cloud data and optical images that have overlapping areas. The improved line feature registration algorithm is used for processing.
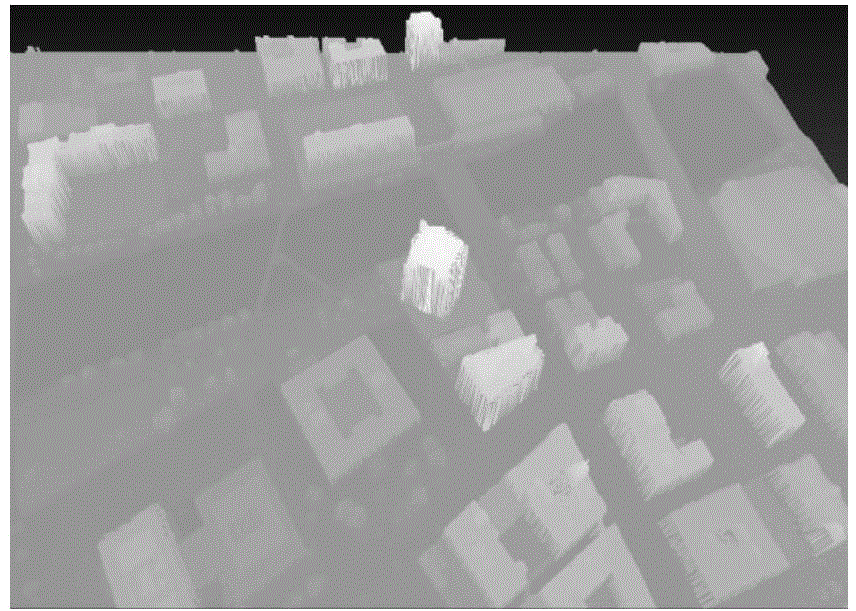
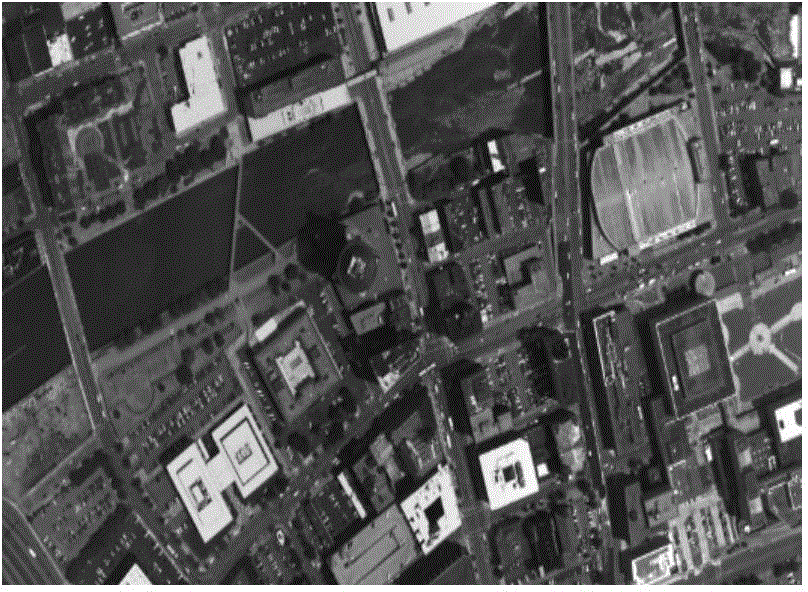
[0077] Figure 2(a) is the point cloud data, Figure 2(b) is the visible light image, and Figure 2(c) is the fused 3D image. According to the fused image, it can be seen that the image realizes the 3D reconstruction of the city, making The point cloud image has the color information of the visible light image.
[0078] The automatic registration and fusion method of point cloud data and optical images based on line features in the present invention has high degree of automation, good robustness, small amount of calculation and high performance without prior knowledge such as GPS / INS. registration accuracy.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More