

Image Sensor Mounting Error Separation Method Based on Vision Measurement
An image sensor and visual measurement technology, which is applied in the direction of measuring devices, instruments, and optical devices, etc., can solve the problem of rarely considering pixel point offset, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment 1
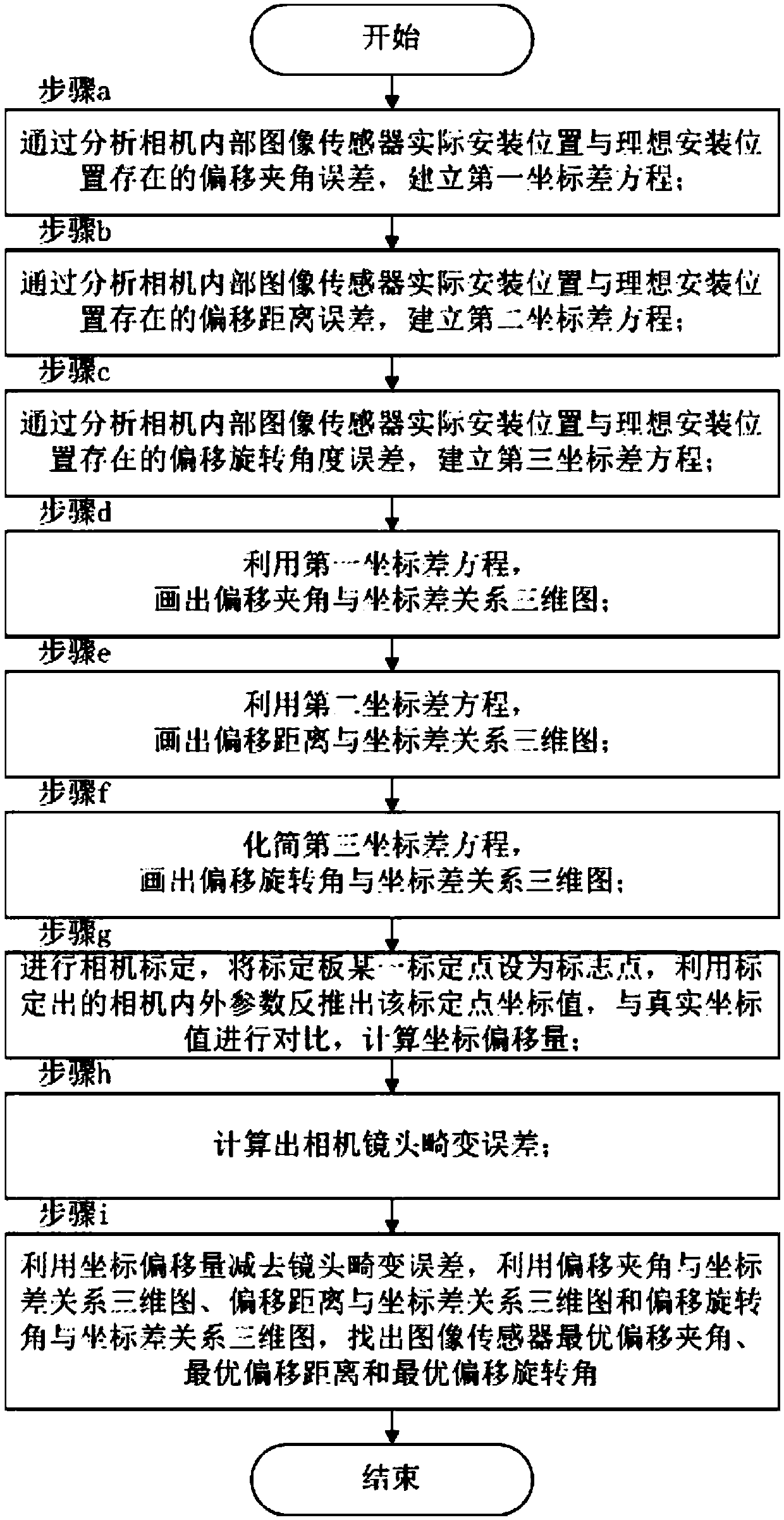
[0055]The method for separating the installation error of the image sensor inside the camera based on visual measurement in this embodiment, the flow chart is as follows figure 1 As shown, the method includes the following steps:
[0056] Step a, by analyzing the offset angle error between the actual installation position and the ideal installation position of the image sensor inside the camera, perform mathematical modeling, and establish the first coordinate difference equation between the actual imaging point and the ideal imaging point in the image sensor;
[0057] Step b, by analyzing the offset distance error between the actual installation position and the ideal installation position of the image sensor inside the camera, perform mathematical modeling, and establish a second coordinate difference equation between the actual imaging point and the ideal imaging point in the image sensor;
[0058] Step c, by analyzing the offset rotation angle error between the actual inst...
specific Embodiment 2
[0065] The method for separating the installation error of the camera internal image sensor based on visual measurement in this embodiment, on the basis of the specific embodiment 1, further defines step a as follows:
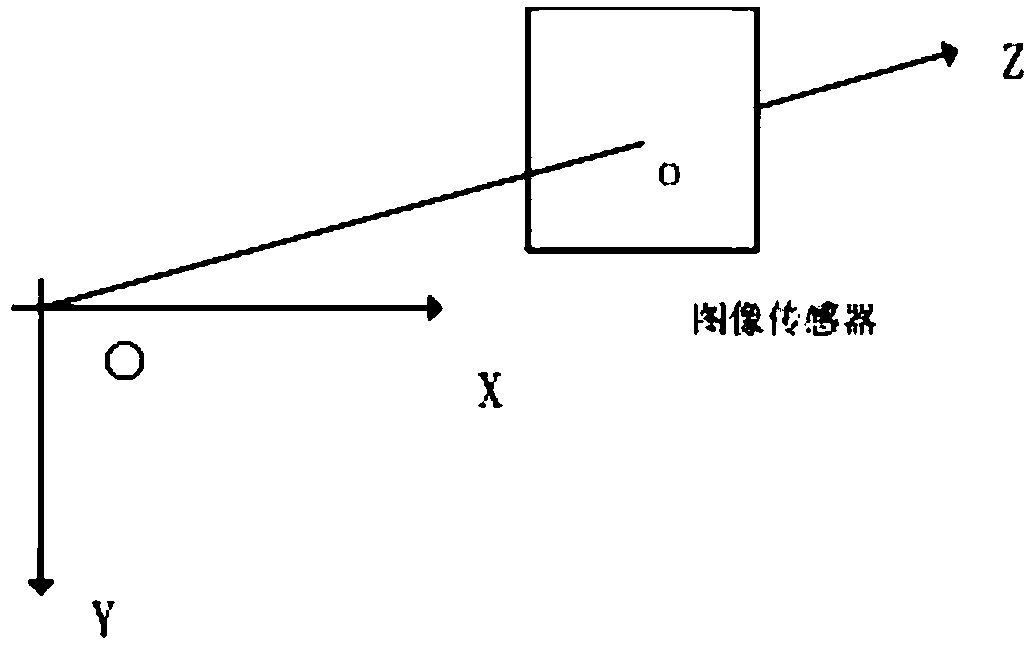
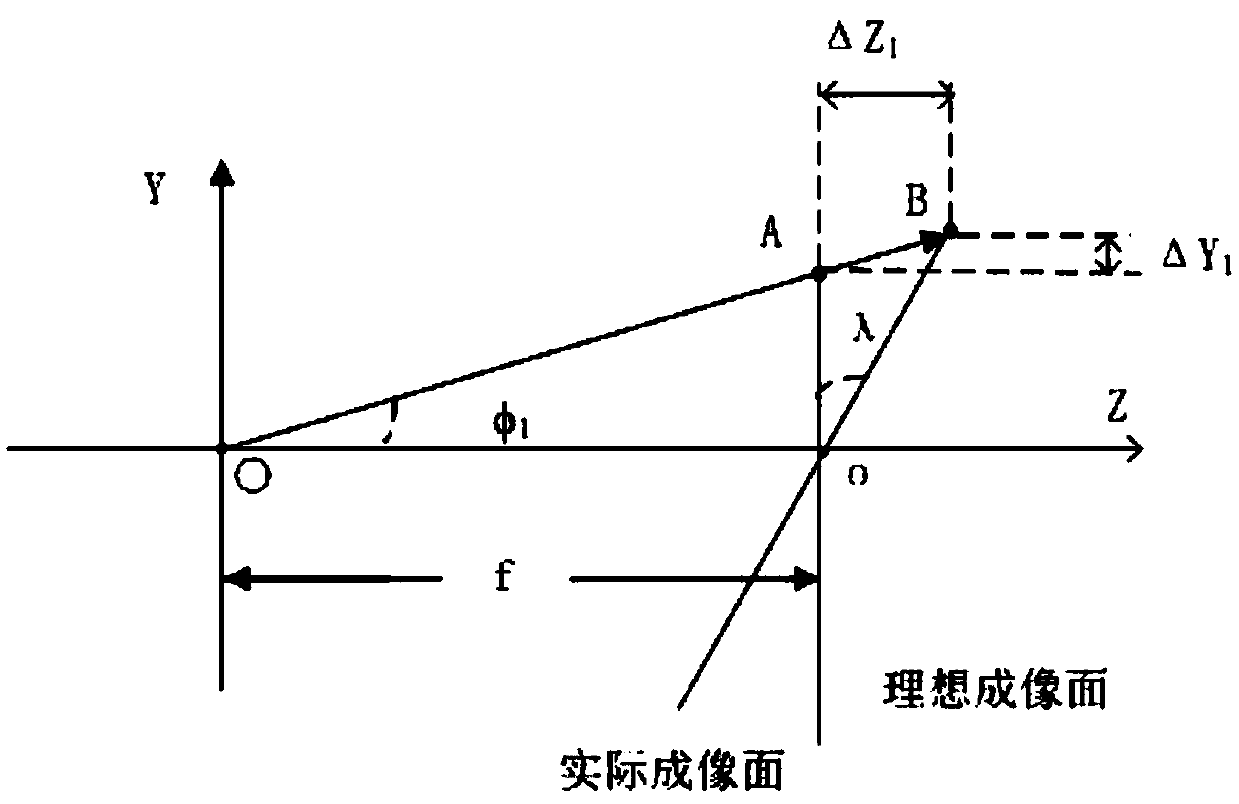
[0066] The camera coordinate system O-XYZ is established with the optical center of the camera as the origin, the Z axis coincides with the camera optical axis, the X and Y axes are parallel to the image sensor, o is the intersection point of the Z axis and the image sensor, and Oo is the focal length f of the camera; then the image Y-axis offset ΔY between the coordinates of the actual imaging point in the sensor and the coordinates of the ideal imaging point in the camera coordinate system 1 and the Z-axis offset ΔZ 1 They are:
[0067]
[0068]
[0069] In the formula, f represents the focal length of the camera, φ 1 Indicates the angle between the incident light and the z-axis, and λ indicates the angle between the actual installation position of th...
specific Embodiment 3
[0070] In this embodiment, the method for separating the installation error of the image sensor inside the camera based on visual measurement, on the basis of the specific embodiment 1, further defines step b as follows:
[0071] The camera coordinate system O-XYZ is established with the optical center of the camera as the origin, the Z axis coincides with the camera optical axis, the X and Y axes are parallel to the image sensor, and o is the intersection point of the Z axis and the image sensor; then the coordinates of the actual imaging point in the image sensor and Y-axis offset ΔY of the ideal imaging point coordinates in the camera coordinate system 2 and the Z-axis offset ΔZ 2 They are:
[0072] ΔY 2 =Δf·tanφ 2
[0073] ΔZ 2 =Δf
[0074] In the formula, Δf represents the deviation between the actual installation position of the image sensor and the ideal installation position, φ 2 Indicates the angle between the incident ray and the Z axis.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More