

Indoor positioning method for mobile robot based on multi-sensor fusion
A multi-sensor fusion and mobile robot technology, which is applied to instruments, measuring devices, surveying and navigation, etc., can solve the problems that laser matching cannot infer displacement based on matching results, expensive, data errors, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] It should be noted that, in the case of no conflict, the embodiments of the present invention and the features in the embodiments can be combined with each other.
[0052] The present invention will be described in detail below with reference to the accompanying drawings and examples.
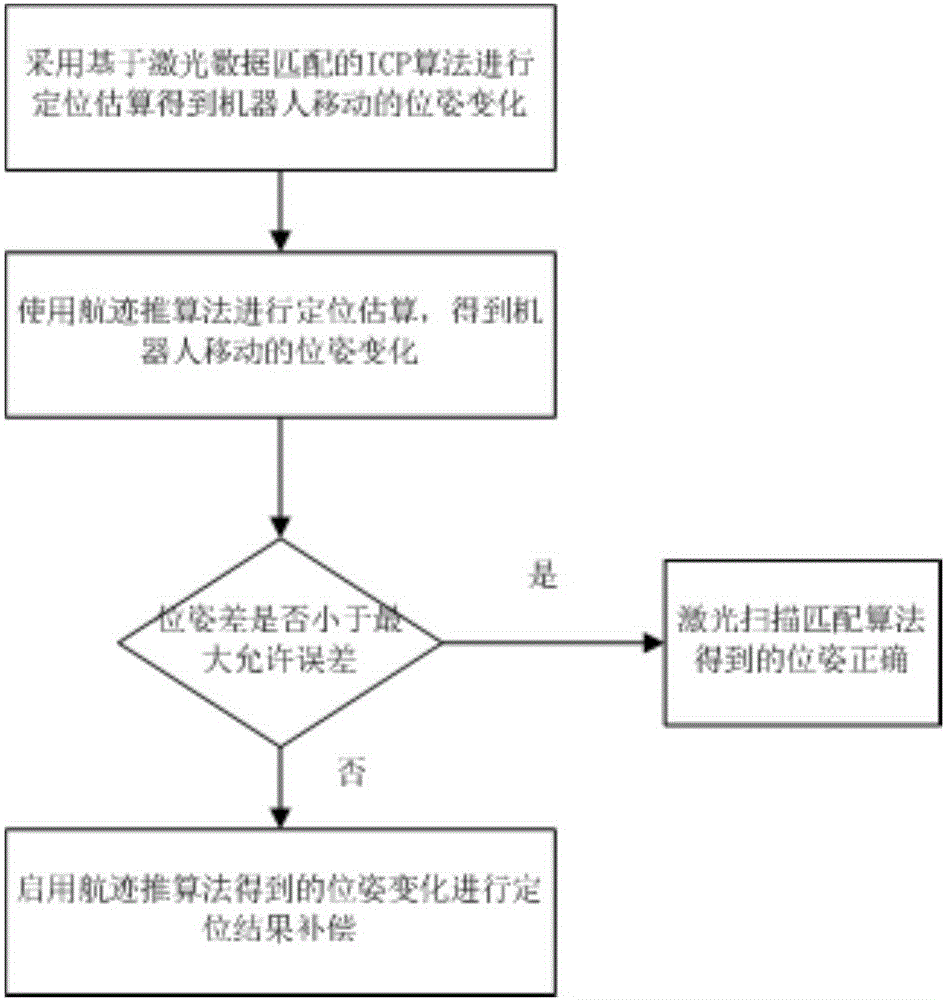
[0053]The present invention uses the odometer positioning data based on dead reckoning to compensate the scan matching positioning of the laser radar, and the realization of the method is based on the following theory:
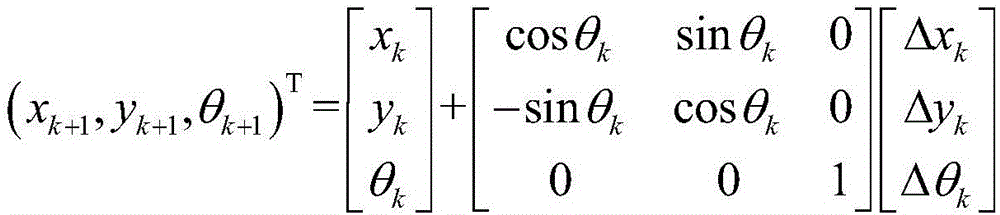
[0054] (1) Encoder-based dead reckoning model
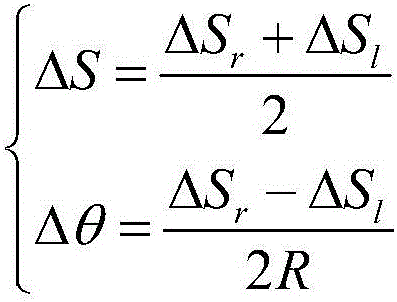
[0055] Assuming that within a sampling period, the feedback from the motor encoder is received, the unit conversion results in the moving distances of the left wheel and the right wheel as ΔS l and ΔS r , the rotated angle is Δθ, then the moving distance and rotation angle of the robot in this adoption cycle can be calculated:
[0056]
[0057] Among them, 2R is the distance between the two wheels of the robot, ΔS is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More