

Target tracking-before-detecting method based on Gaussian cardinalized probability hypothesis density filter
A technology of hypothetical density and target detection, applied in radio wave measurement systems, radio wave reflection/re-radiation, measurement devices, etc., can solve problems such as high complexity, large particle support set, and sampling exhaustion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
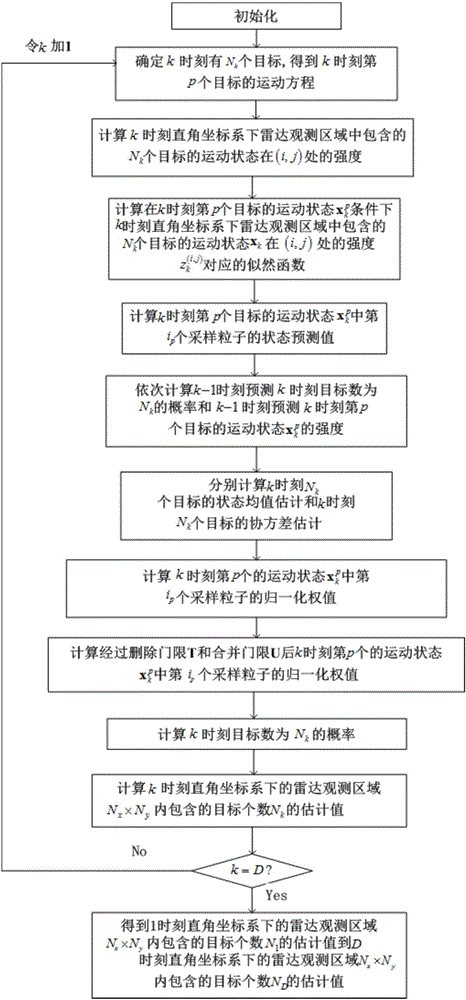
[0040] refer to figure 1 , is a flow chart of a target tracking method before detection based on Gaussian particle potential probability assumption density filtering of the present invention; the target tracking method based on Gaussian particle potential probability assumption density filtering includes the following steps:
[0041] Step 1, initialization: let k represent time k, the initial value of k is 1, k∈{1,2,...,D}, D represents the maximum time set, and D is the movement time of observing each target; this In the embodiment, D=60 is set.
[0042] 0 time N 0 The motion state of a target is denoted as x 0 , set 0 time N 0 The motion state x of a target 0 The intensity at (i,j) is denoted as and abbreviated as z 0 ; Then calculate N at time 0 0 The motion state x of a target 0 Intensity at (i,j) condition 0 time N 0 The motion state x of a target 0 The posterior probability density p(x 0 |z 0 ), p(x 0 |z 0 )=N(x 0 μ 0 ,P 0 ), N(x 0 μ 0 ,P 0 ) means...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More