

Stratospheric airship fixed-height flight nonlinear PID control method
A technology of stratospheric airship and control method, which is applied in the field of aircraft control, and can solve problems such as excessively large expected pitch angle signals, difficulty in ensuring rapidity of altitude control, and difficulty in adapting
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
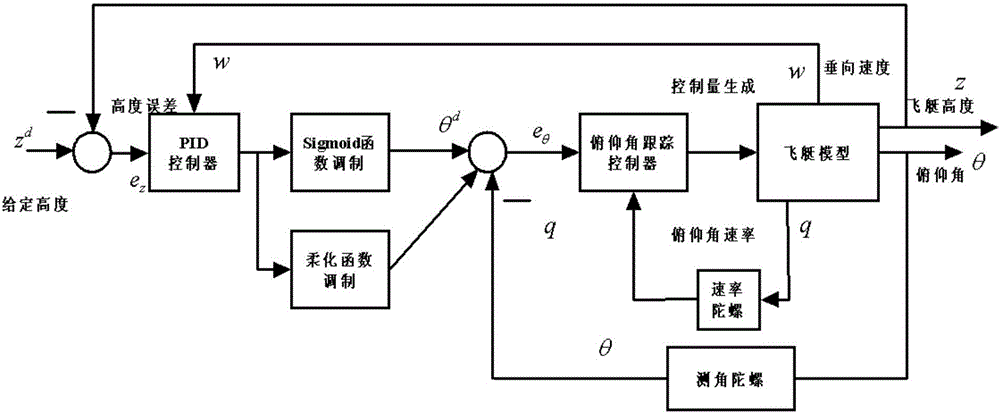
[0118] First, the PID control law is used to set the pitch angle stability controller of the airship, and other control laws can also be used to design the pitch angle stability controller to realize the control function of the airship attitude stability. The design of the attitude stability controller will not be elaborated here. Mainly because the core technology of the present invention lies in the generation of altitude command, so the discussion of the present invention is carried out on the basis that the design of default attitude stability controller is complete, so here only take PID attitude stability control as an example, to complete the height control example.
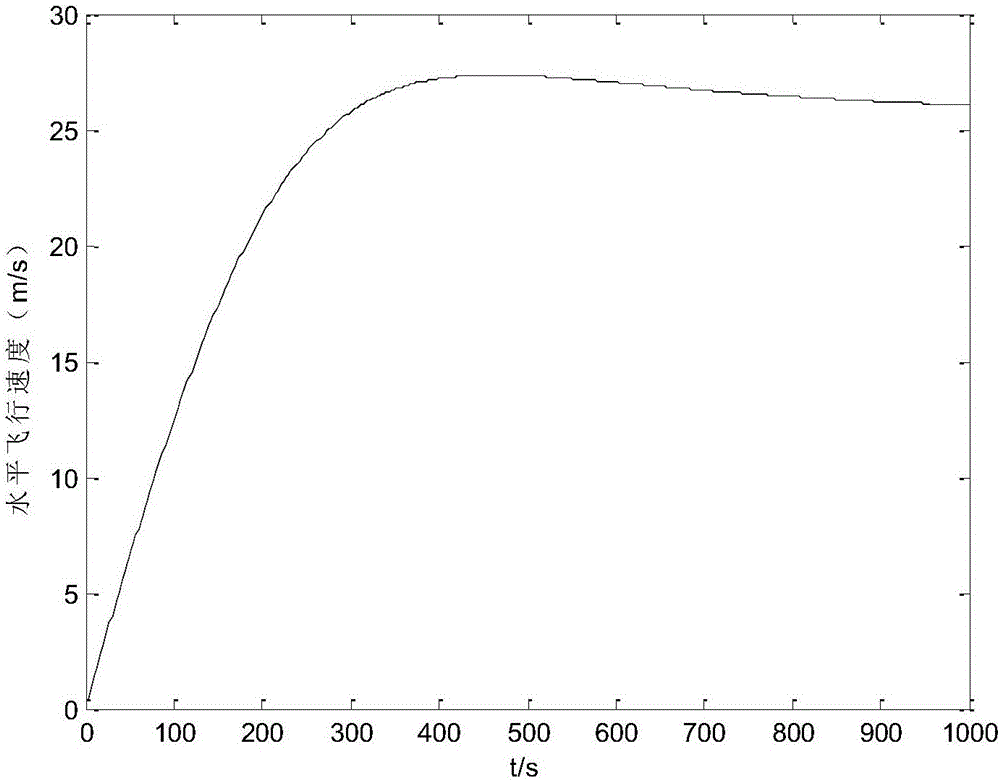
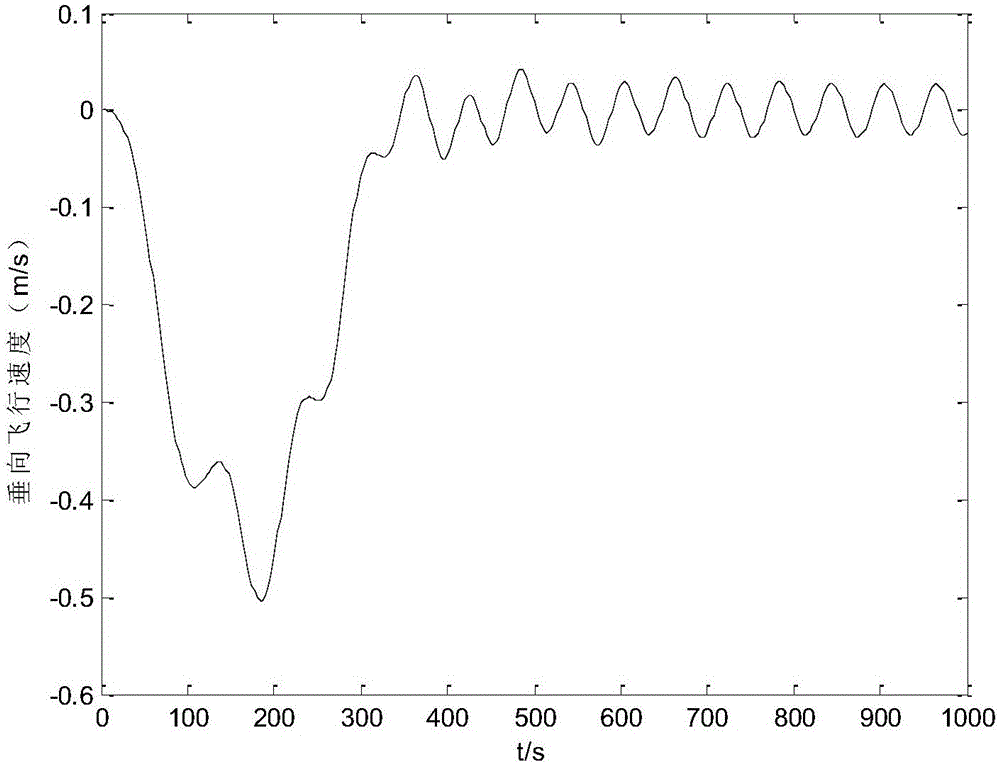
[0119] On the basis of the complete design of the above-mentioned attitude stability controller, the initial height of the airship is set to 0 meters, the initial speed is 0 m / s, and the desired given height is assumed to be 500 meters. And set the engine thrust as a constant value u 2 =8000, the final st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More