

Ground point cloud segmentation method based on three-dimensional laser radar
A 3D laser and lidar technology, applied in 3D image processing, image data processing, instruments, etc., can solve the problems of missed detection of point cloud data, inability to process a large amount of disordered point cloud data, and poor real-time performance of a large amount of point cloud data , to achieve the effect of accurate extraction, high real-time performance and improved accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
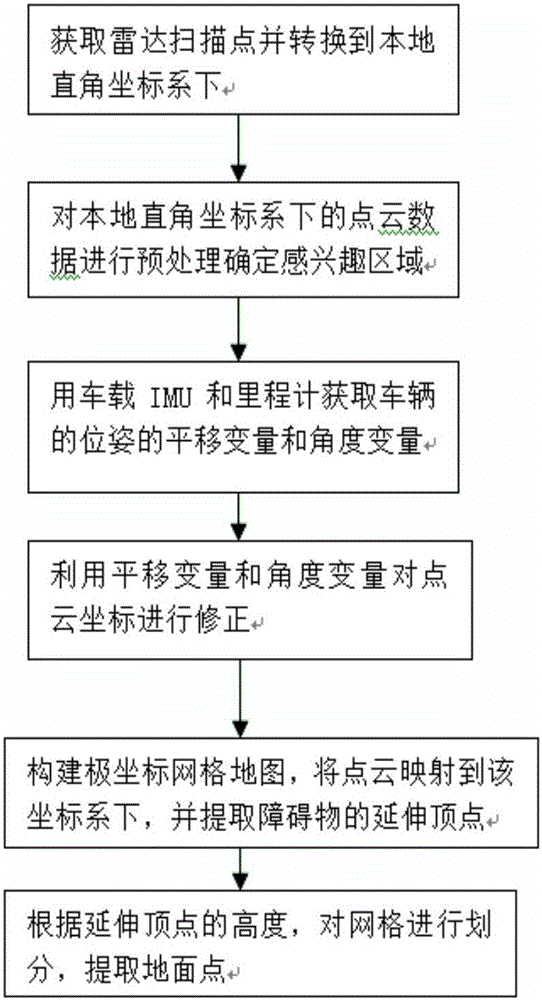
[0051] like figure 1 A kind of ground point cloud segmentation method based on three-dimensional laser radar provided by the present invention comprises the following steps:
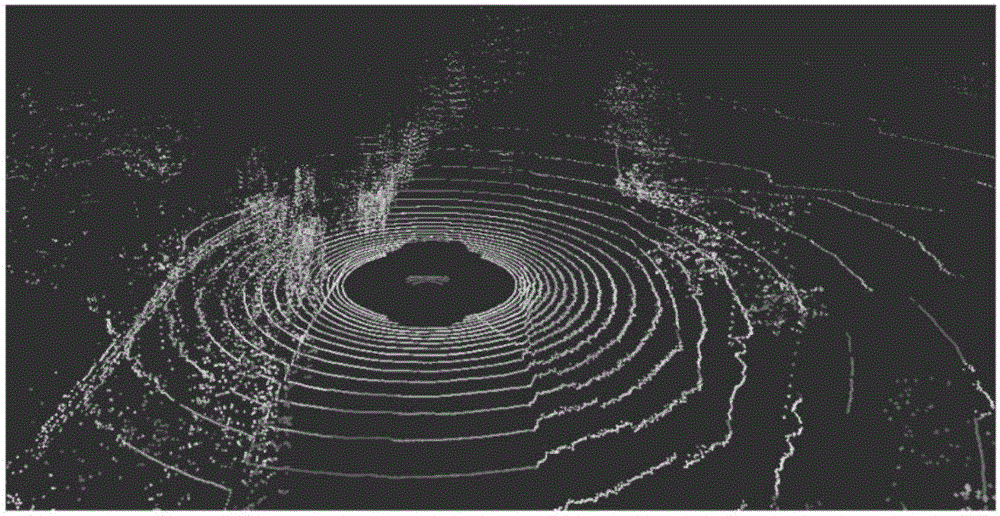
[0052] Step 1: Establish a local Cartesian coordinate system with the center of the lidar as the coordinate origin, obtain the polar coordinate data of the 3D Lidar scanning point cloud around the vehicle and convert it to the local Cartesian coordinate system, and then analyze the point cloud in the local Cartesian coordinate system The data is preprocessed to determine the target area;
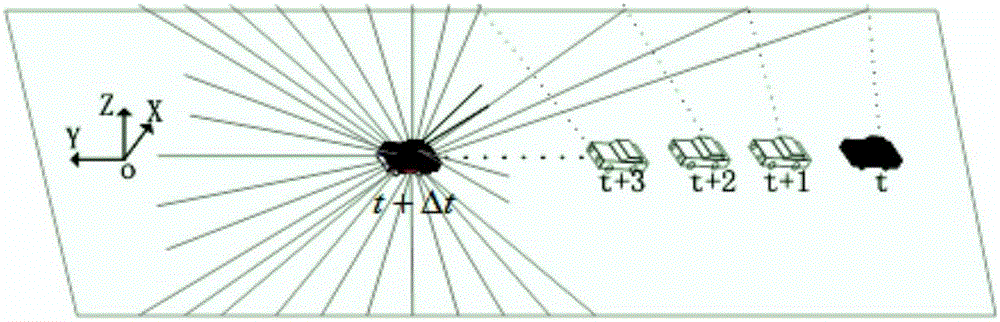
[0053] Step 2: In the local Cartesian coordinate system, use the on-board IMU and odometer to obtain the translation variable and angle variable of the vehicle's current pose relative to the previous moment position, and use the translation variable and rotation angle variable to compare the point cloud data in the local Cartesian coordinate system The coordinates are corrected;
[0054] Step 3, constructing a polar ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More