

Method for actively controlling judder during start-up of electric vehicle based on pole assignment
An electric vehicle, active control technology, applied in electric vehicles, control drive, power management and other directions, can solve problems affecting driving comfort, etc., and achieve the effect of convenient implementation, improved control accuracy, and simple method.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
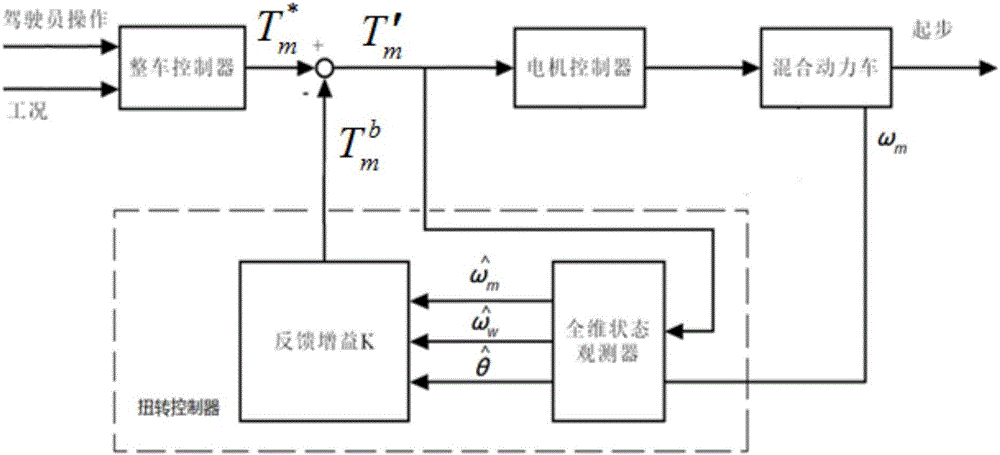
[0034] A method for active control of starting vibration of an electric vehicle based on pole configuration, the method comprising the following steps:
[0035] Step (1) Establish the original state space model of the electric vehicle system, and determine the motor speed ω m For motor torque T m The transfer function G m (s).
[0036] Take motor speed ω m , wheel angular velocity ω w And the semi-axis torsion angle θ establishes a state space model, and its state space equation is:
[0037]
[0038] Where u is the system input, u=T m , X is the state variable, Y is the system output, A, B, C, D are the parameter matrix, Y=X=[ω m ω w θ] T .
[0039] Obtain the motor speed ω according to the Laplace transform m For motor torque T m The transfer function G m (s):
[0040]
[0041] The poles of the transfer function in formula (2) are p1=-4.845+49.733i, p2=-4.845-49.733i. The two poles lie to the left of the imaginary axis, so the system is stable.
[0042]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More