

Double-mechanical arm cooperative control method for full-automatic blood type serology analysis system
An analysis system and dual manipulator technology, applied in the direction of analyzing materials, instruments, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The drawings are for illustrative purposes only, and should not be construed as limitations on this patent; in order to better illustrate this embodiment, some parts in the drawings will be omitted, enlarged or reduced, and do not represent the size of the actual product;
[0071] For those skilled in the art, it is understandable that some well-known structures and descriptions thereof may be omitted in the drawings. The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and embodiments.
[0072] With reference to the accompanying drawings, the double-manipulator cooperative control method for the fully automatic blood group serology analysis system of the present invention comprises the following steps:
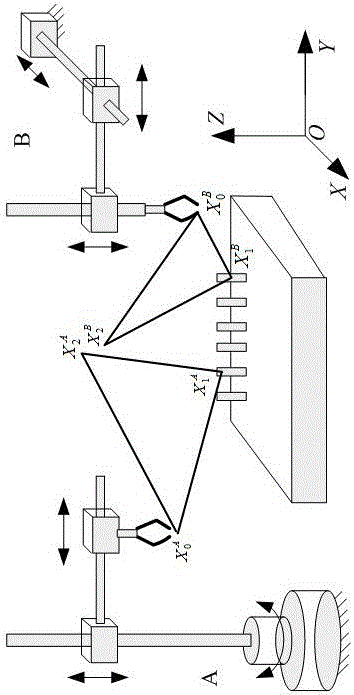
[0073] Step 1: If figure 1 As shown, the system global coordinate system OXYZ is established, and the zero coordinates of robotic arm A and robotic arm B are respectively recorded as and Acc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More