

Passive location algorithm for electro-optical pod
An optoelectronic pod and passive positioning technology, which is applied in satellite radio beacon positioning systems, navigation calculation tools, radio wave measurement systems, etc. Poor performance, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] Embodiments of the present invention are described in detail below, and the embodiments are exemplary and intended to explain the present invention, but should not be construed as limiting the present invention.
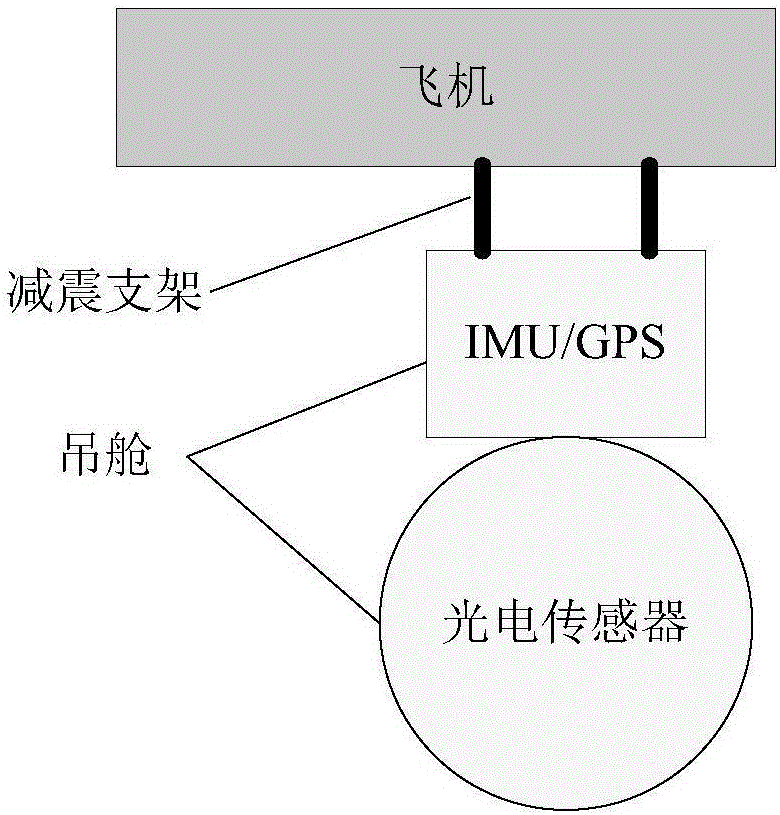
[0024] The photoelectric pod installation method is as follows: figure 1 , IMU and GPS are rigidly connected to the photoelectric pod, which can reduce the angle error caused by the shock absorber.
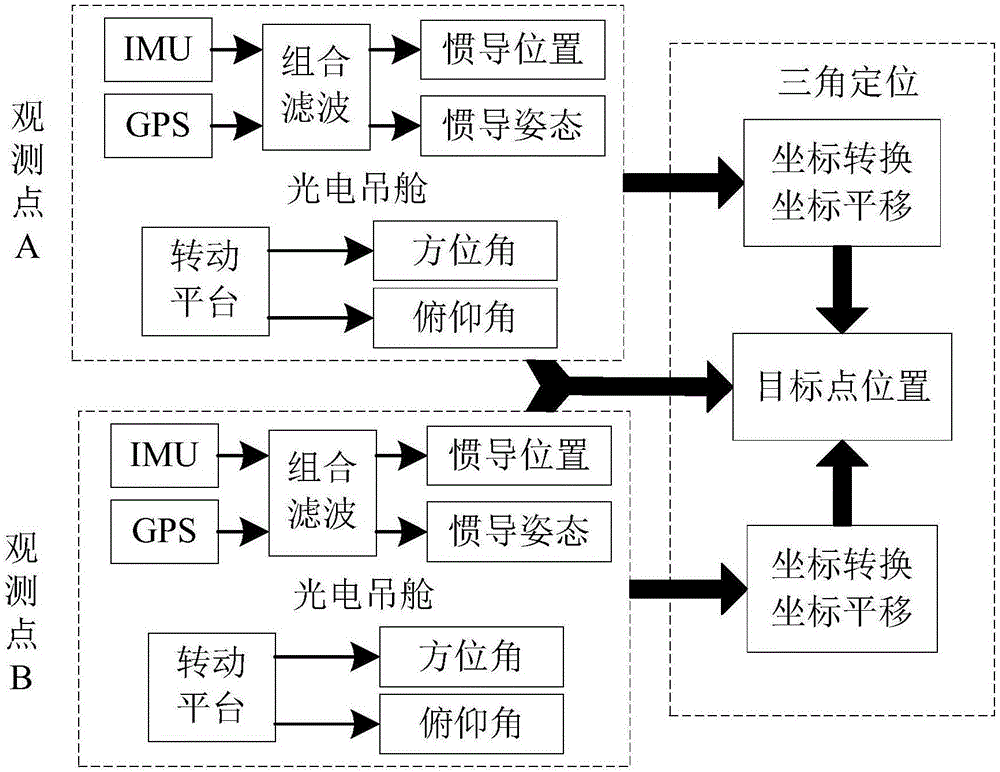
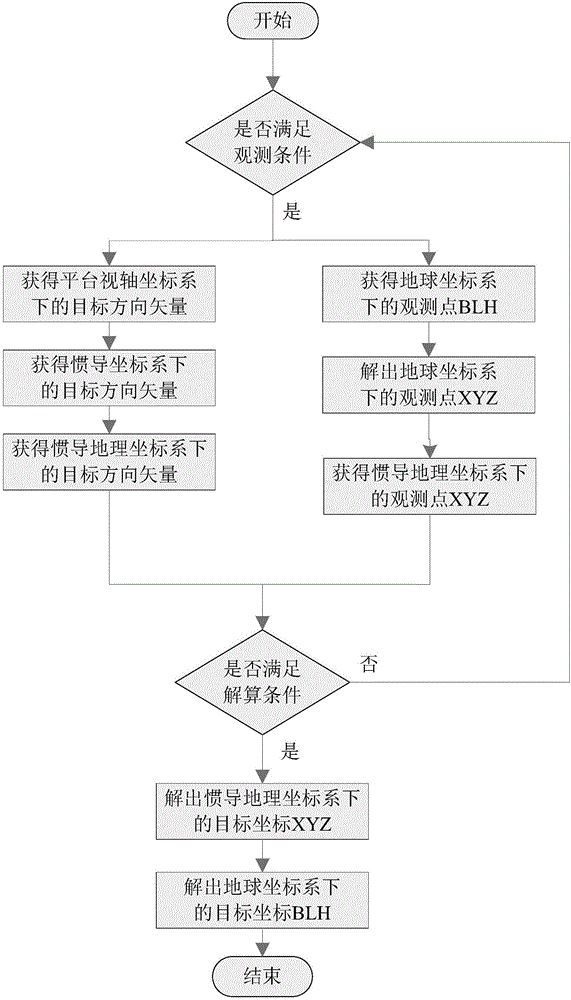
[0025] The overall scheme of this algorithm is as follows figure 2 , the algorithm flow is as follows image 3 .
[0026] The coordinate system defined by this algorithm is as follows:
[0027] 1. Earth coordinate system (OXYZ q )
[0028] The earth coordinate system is established based on the reference ellipsoid of the earth, and the origin O q at the Earth's center of mass, O q x q Pointing to the North Pole, O q Y q It is located on the intersection of the equatorial plane and the prime meridian, pointing positively to 0°longitude. o q Z q Determ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More