Calculation method for driving area of tour inspection robot of transformer station
A technology for patrolling robots and driving areas, applied in computing, computer parts, instruments, etc., can solve the problem that many steps cannot meet the requirements of real-time performance, cannot meet the unattended intelligent substation, and cannot detect road edges well and other problems, to achieve the effect of enhancing automation and intelligence capabilities, high accuracy and high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0072] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
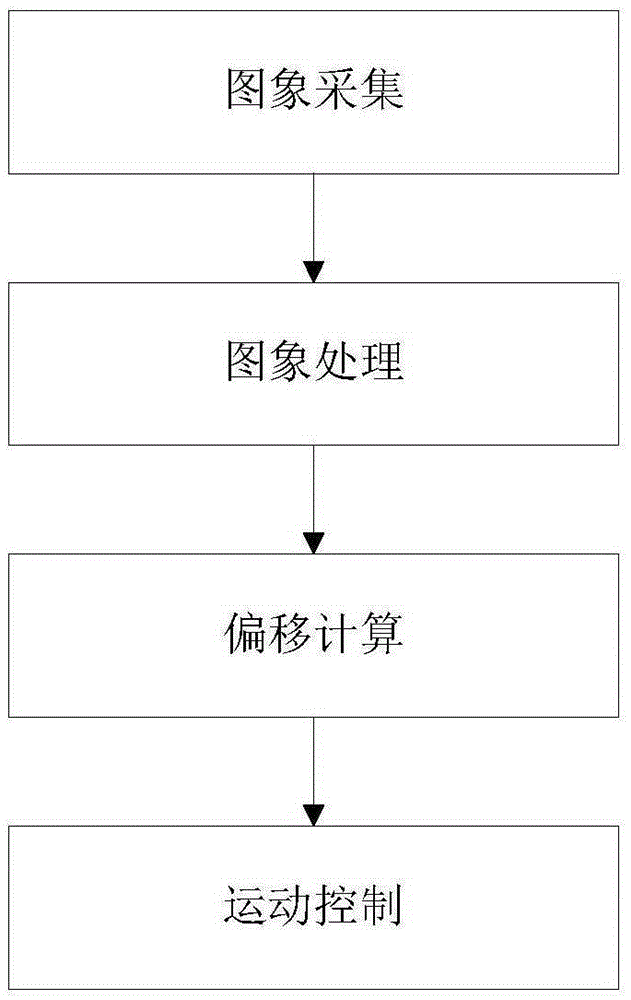
[0073] Such as figure 1 As shown, the calculation method of the driving area of the substation inspection robot includes the following steps:
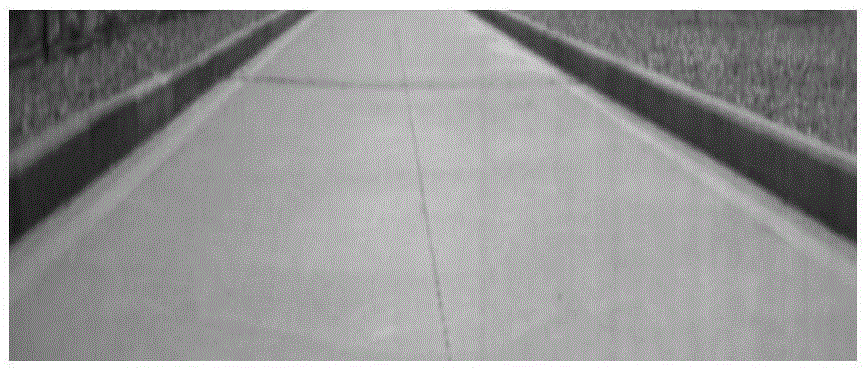
[0074] Step (1): Image collection: real-time collection of road images of the substation inspection robot during driving;
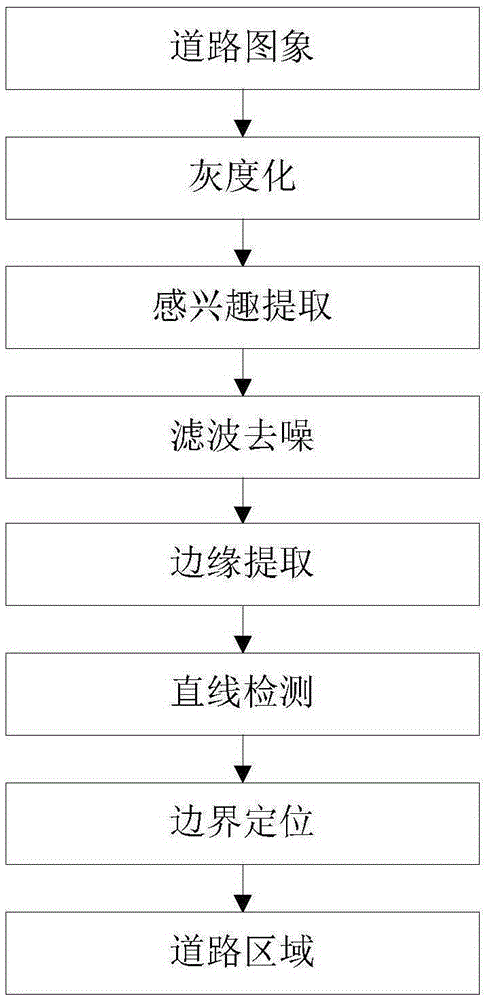
[0075] Step (2): Image processing: Select the ROI area of the road image in step (1), then grayscale, filter and denoise the selected ROI area, and extract the edge to obtain the edge information of the road image, which is obtained by line detection Road area boundaries;
[0076] Step (3): Offset calculation: Calculate the distance from the center point of the road ROI image to the left / right border of the road area, and then calculate the distance from the robot to the left / right border of the road area through the offset formula, which is the robot offset distance ;
[0077] Step...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com