

Single-lower-limb exoskeleton orthopedic apparatus and orthopedic control method
A technology of exoskeleton and orthosis, which is applied in the field of single lower extremity exoskeleton orthosis and orthopedic control, which can solve problems such as large size and mass, unstable center of gravity, and stiff left posture, and achieve light structure, weight reduction, and easy wear Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
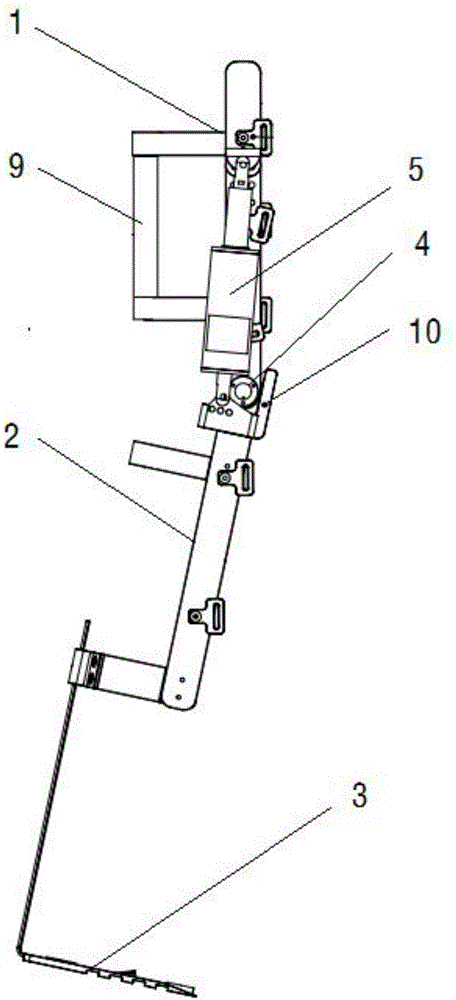
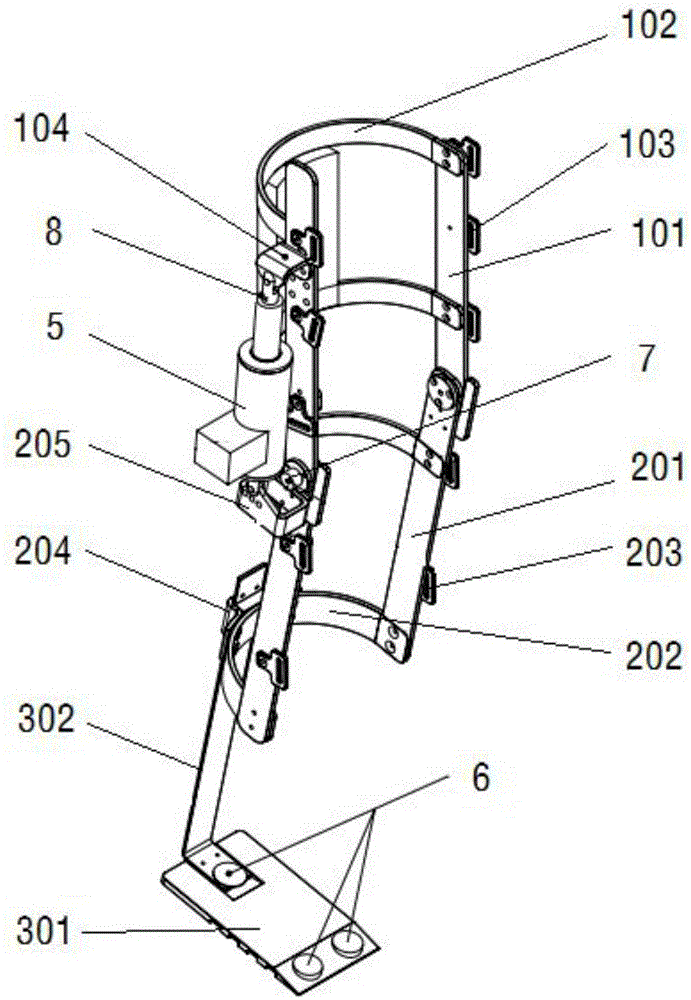
[0041] like Figure 1-4 As shown, the single lower limb exoskeleton orthosis provided by the embodiment of the present invention includes a support mechanism, an adjustment mechanism and a control mechanism.
[0042] The support mechanism includes a thigh support part 1, a calf support part 2 and a sole support part 3, wherein the thigh support part 1 and the calf support part 2 are connected through a knee joint rotating shaft 4, and the calf support part 2 is connected to the calf support part 2. The sole support part 3 is connected through an adjustable connecting piece.
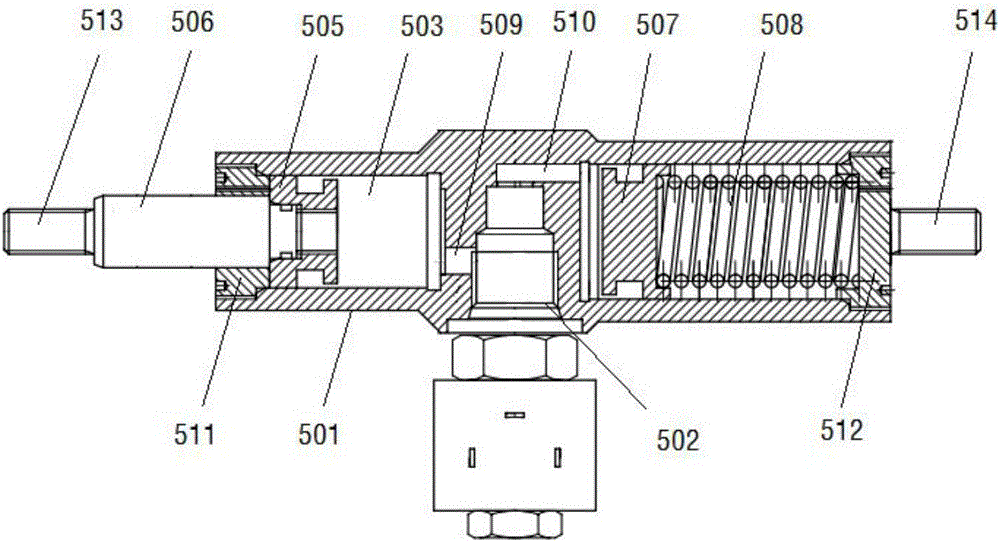
[0043] The adjustment mechanism includes a hydraulic damper 5, and the two ends of the hydraulic damper 5 are connected to the thigh support part 1 and the calf support part 2 respectively. like Figure 3-4 As shown, the hydraulic damper 5 includes a piston cylinder 501 and a proportional valve 502 connected with the piston cylinder 501, wherein the piston cylinder 501 is provided with a first oil chamb...
Embodiment 2
[0057] The present invention also provides a method for orthopedic control using the single lower extremity exoskeleton orthosis described in the first embodiment above. It is fixed on the lower limbs of the human body. During the walking process of the human body, the piston rod in the hydraulic damper 5 will perform a corresponding telescopic movement in accordance with the walking state of the human body. Then described control method specifically comprises the following steps:
[0058] The plantar pressure sensor 6 detects plantar pressure data in real time, and transmits the detected plantar pressure data to the controller 9 .
[0059] The knee joint angle sensor 7 detects knee bending angle data in real time, and transmits the detected knee bending angle data to the controller 9 .
[0060] The piston rod thrust sensor 8 detects the piston rod thrust data of the hydraulic damper in real time, and transmits the detected piston rod thrust data to the controller 9 .
[006...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More