

Optimal track planning method for space robot for capturing rolling target
A space robot, trajectory planning technology, applied in instruments, manipulators, program-controlled manipulators, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
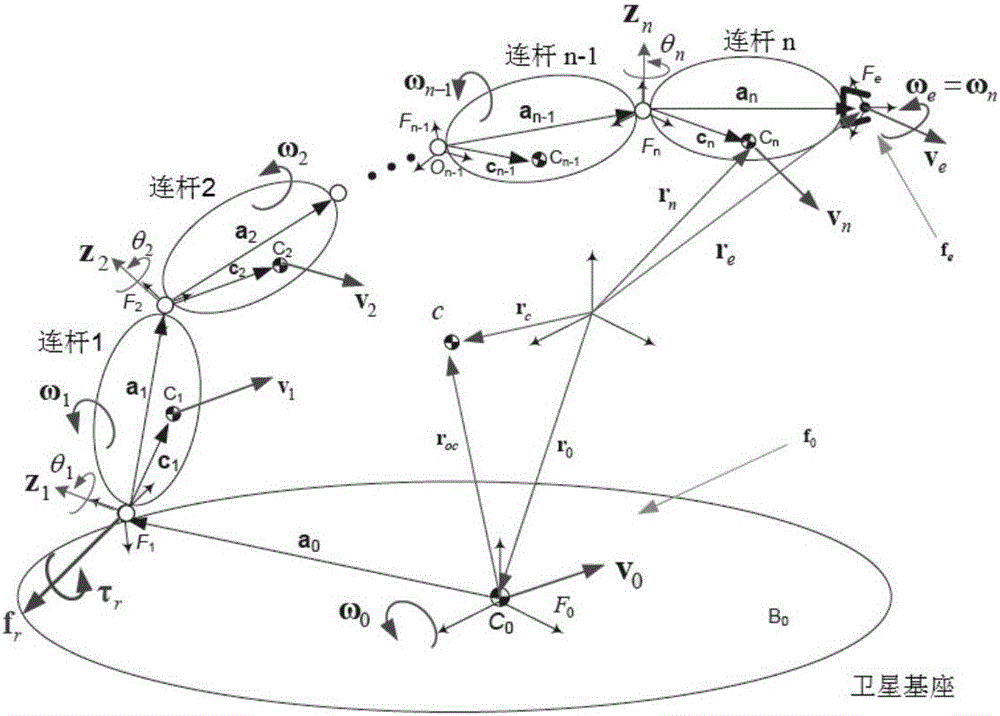
[0132] Taking a space robot with a three-degree-of-freedom manipulator to capture a tumbling target as an example, the effectiveness of the method for planning the optimal capture trajectory of a space robot in the present invention is illustrated. The kinematics / dynamic parameters of the space robot are shown in Table 2, assuming that the moment of inertia of the rolling target is:
[0133]
[0134] In the body coordinate system, the position vector of the capture point is At the initial moment, the components of the rotation speed of the target in the three axes of the body coordinate system are [-4-2-4] deg / sec respectively.
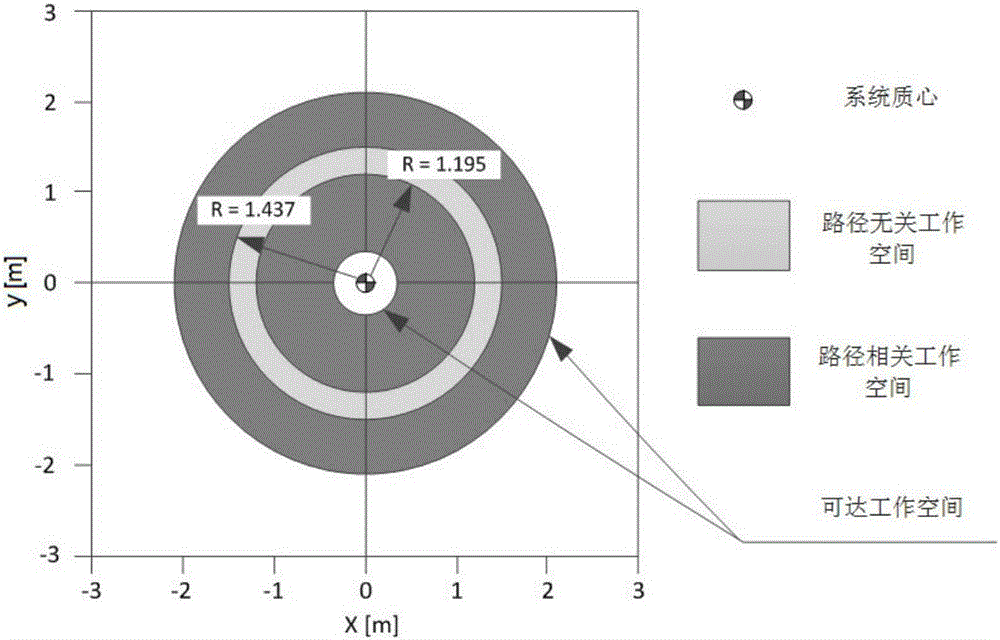
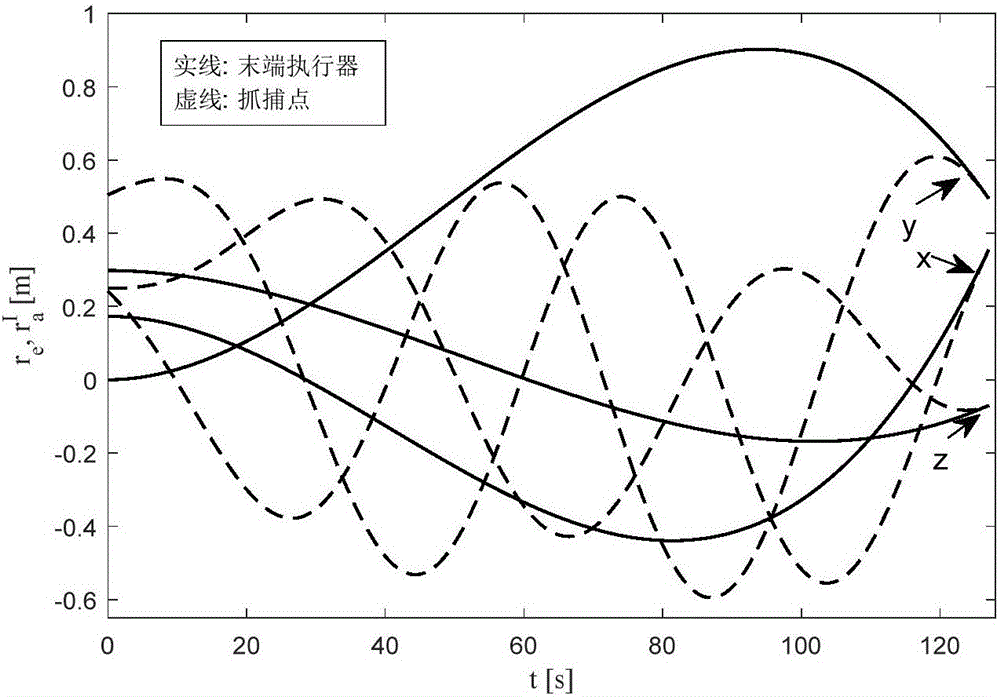
[0135] Using the calculation process described in step 2, the workspace distribution of the space robot is obtained as figure 2 As shown, the best capture timing is obtained at the same time corresponding to the time t=127s. At this time, the capture point appears at the position [0.3538,0.4949,-0.0702]m, and its speed is [0.0395,-0.0271,0.0084...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More