

A Method for Measuring Lateral Offset of Roadheader
A measurement method and lateral offset technology, which are used in measurement devices, radio wave measurement systems, earth-moving drilling, etc., can solve the problems of reducing reflection utilization, small receiving range, and difficulty in receiving laser signals to prevent excessive deviation. Effects that affect measurement results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
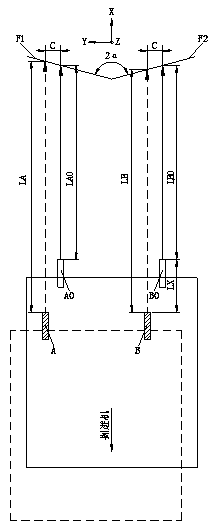
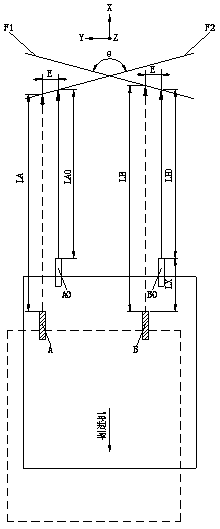
[0032] Embodiment 1: as figure 2 and image 3 As shown, a method for measuring the lateral offset of a roadheader in this embodiment includes the following steps:
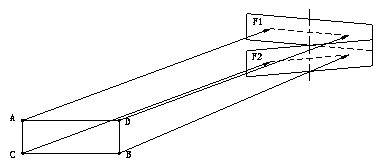
[0033] 1) Install two independent reflective surfaces F1 and F2 at the initial calibration point of the roadway, where the reflective surfaces F1 and F2 are independent vertical planes, and the length directions of the reflective surfaces F1 and F2 are located in the horizontal direction and match the width of the roadway. The centerlines of the reflective surfaces F1 and F2 are located on the central line of the roadway section, and the reflective surfaces F1 and F2 intersect up and down to form a certain angle θ;
[0034] 2) Install laser rangefinder A, laser transmitter D, laser rangefinder B, and laser transmitter C respectively on the roadheader corresponding to the two reflecting surfaces F1 and F2, where laser rangefinder A and laser transmitter D are located at the same Height, laser rangefinder B and la...
Embodiment 2
[0041] Embodiment 2: as figure 2 and Figure 4As shown, the laser rangefinder D, laser transmitter A, laser rangefinder C, and laser transmitter B are respectively installed on the roadheader corresponding to the two reflecting surfaces F1 and F2, wherein the laser rangefinder D and laser transmitter A are located at In the same horizontal plane, laser range finder C and laser transmitter B are located in the same horizontal plane, laser range finder D and laser transmitter B are located in the same vertical plane parallel to the roadway axis, laser range finder C and laser transmitter A is located in the same vertical plane parallel to the axis of the roadway, and the laser range finder D and laser range finder C are located in the same vertical plane perpendicular to the axis of the roadway. In the initial position, the distance between the laser range finder D and the reflecting surface F1 The distance between the laser range finder C and the reflective surface F2 is LC0,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More