

Motion track planning method and system for carrying robot
A technology for robot movement and handling robots, used in control/regulation systems, instruments, non-electric variable control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
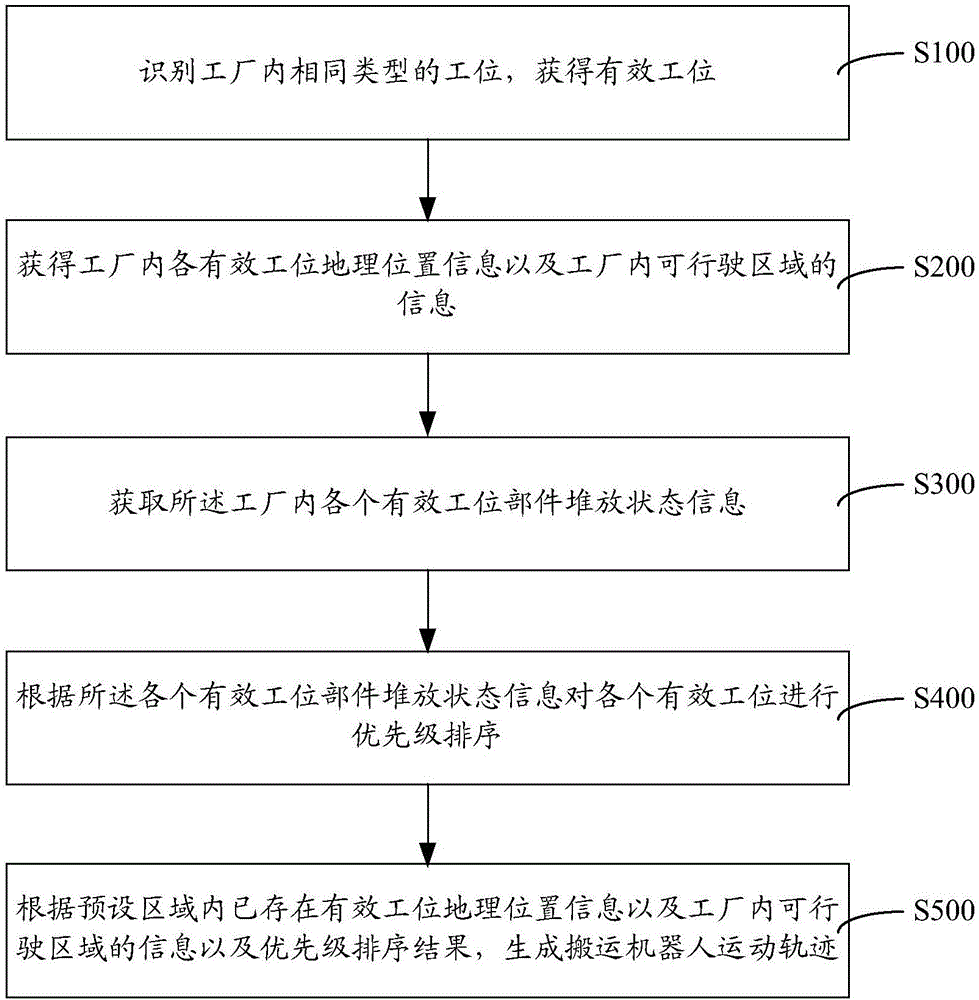
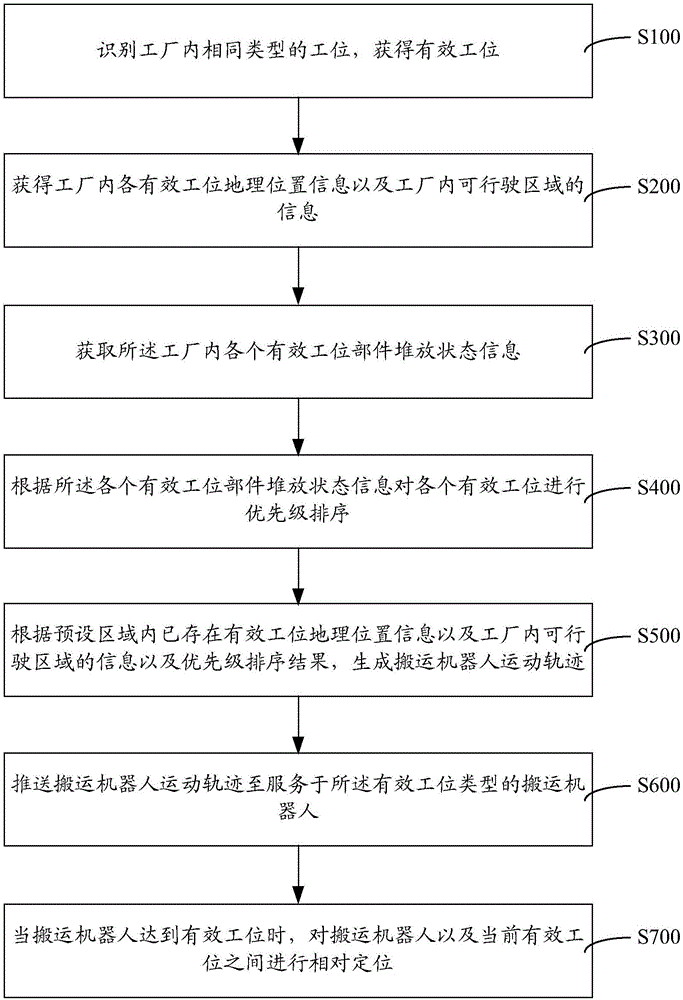
[0023] Such as figure 1 As shown, a moving robot trajectory planning method, including steps:
[0024] S100: identifying the same type of workstations in the factory, and obtaining valid workstations.
[0025] The classification of workstation types in the factory can be classified based on industry standards, or multiple workstations can be classified into one category based on the needs of practical applications, and the same category identification marks can be assigned to the workstations classified into one category. For example, the factory can be divided into stamping stations, milling stations and assembly stations. Different handling robots can be set up at different stations to carry the corresponding raw materials and finished products. For example, for the stamping station, the corresponding handling robot needs to carry the stamping raw material (steel plate), and transport the stamped finished product of the stamping station to the next production Station. Her...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More