

Attitude stabilization control method of space-tethered grabber based on fractional order differentiation in stages
A stable control method and fractional derivative technology, applied in attitude control, control/regulation system, non-electric variable control, etc., to achieve fast response, avoid collision, and save fuel.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
[0034] The technical scheme adopted in the present invention comprises the following steps:
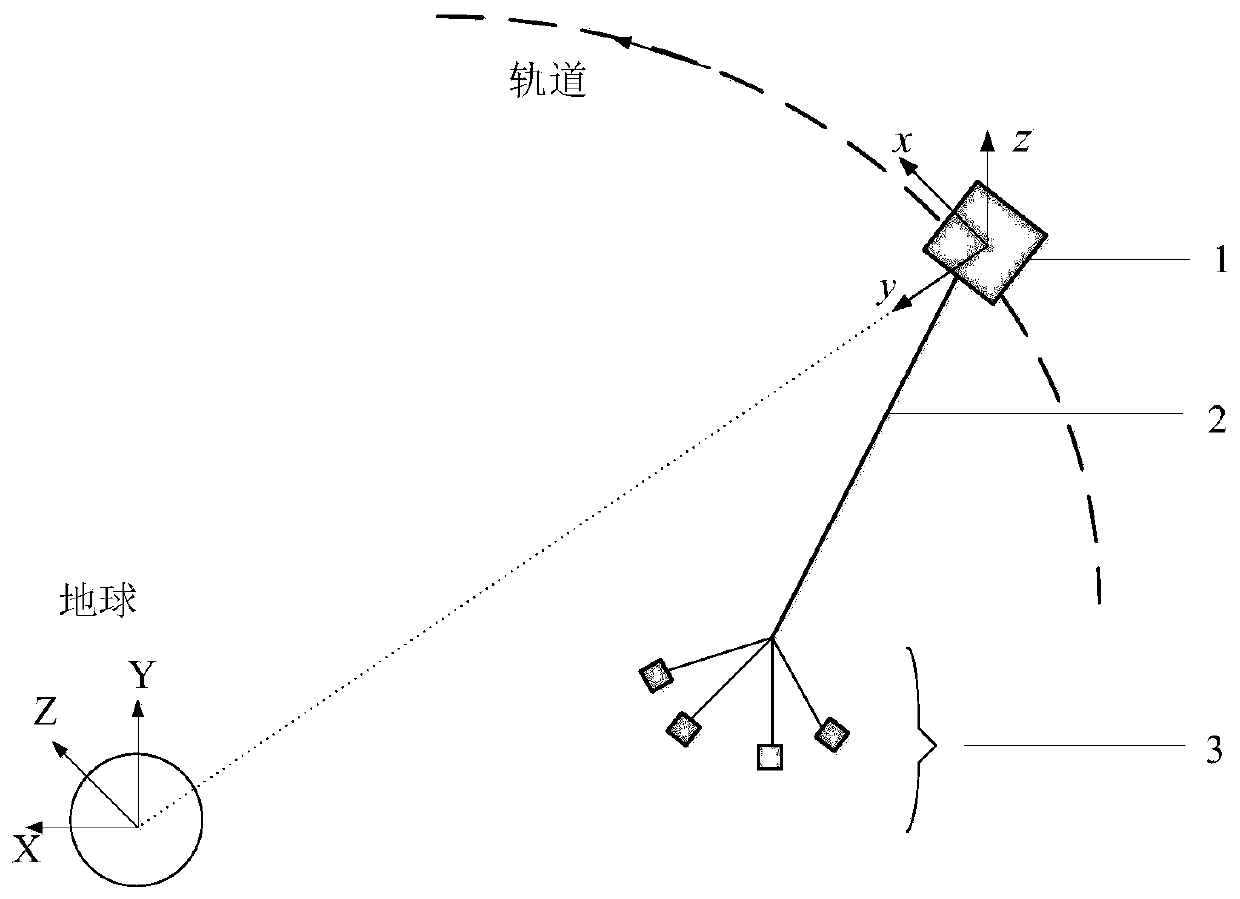
[0035] 1) Establish the dynamic model of the recovery stage of the space tethered catcher;
[0036] 2) Design the PD controller based on the tether recovery rate in the recovery phase;
[0037] 3) In the recovery phase of the design, the PD is based on the recovery rate of the tether and the inner angle of the tether surface μ controller.
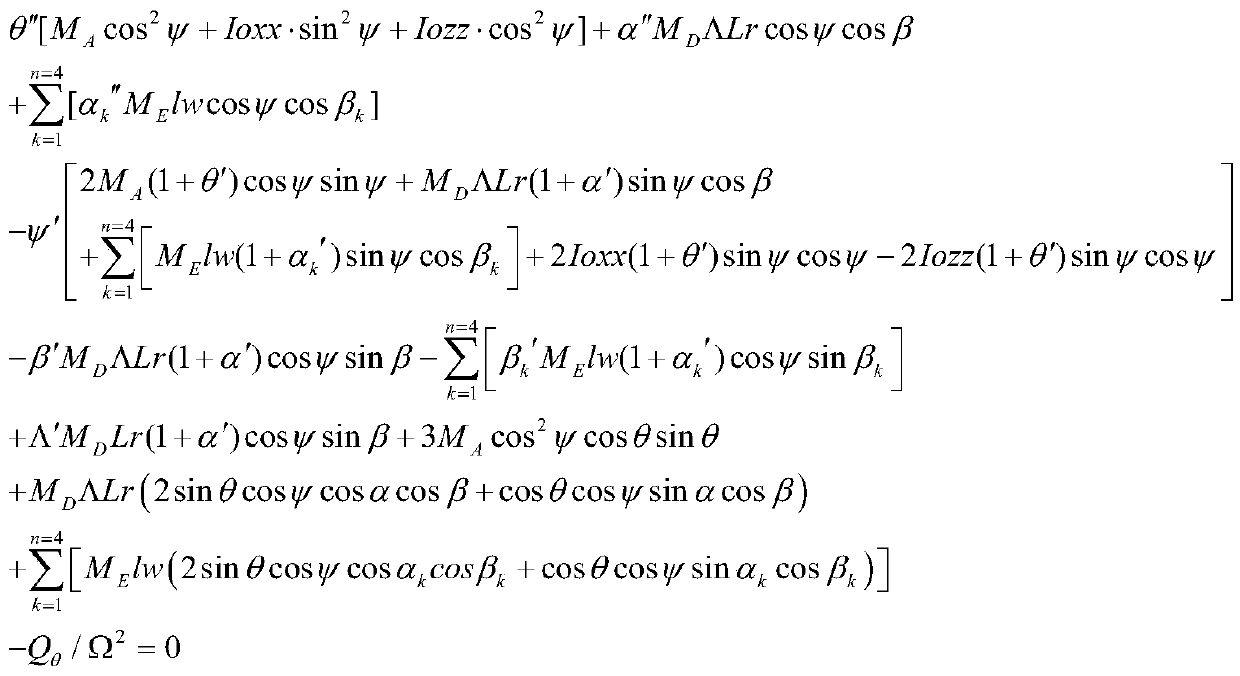
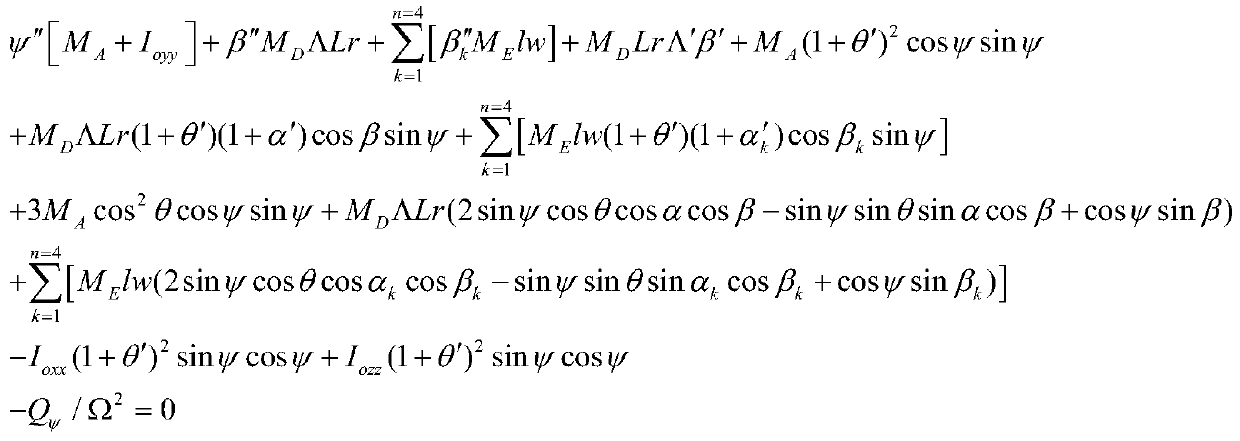
[0038] In the described step 1), the kinetic equation of the recovery stage of the space tether catcher is:
[0039]
[0040]
[0041]
[0042]
[0043]
[0044]
[0045]
[0046]
[0047] Wherein, in formulas (6) and (7), k=1, 2, 3, 4. When k=1,q=2,3,4; when k=2,q=1,3,4; when k=3,q=1,2,4; when k=4,q=1,2, 3. Λ, lw are the length of the connecting tether and flexible rope after dimensionless, θ, are the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More