

Service-oriented robot open-type control system and method based on software bus
A software bus and control system technology, applied in transmission systems, bus networks, digital transmission systems, etc., can solve problems such as high component coupling, inability to realize component runtime configuration, etc., to ensure real-time and deterministic, and solve hot spots. Access problems, the effect of high development efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be described in further detail below in conjunction with examples, but the embodiments of the present invention are not limited thereto.
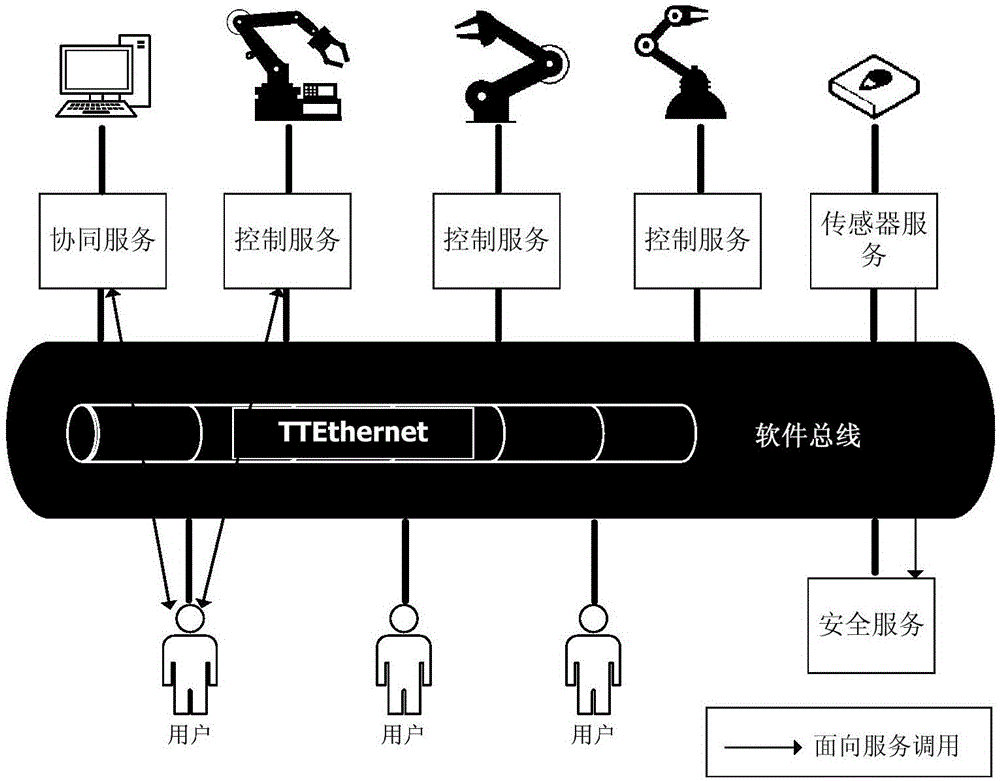
[0047] The service-oriented robot open control system based on software bus in this example, such as figure 1As shown, different types of robots and other device nodes can communicate with each other through the software bus. The software bus is the core component of the entire distributed control system. Its main function is to provide a transparent transmission mechanism for different nodes and decouple the user from the message protocol. By introducing a service-oriented software architecture, the present invention makes the functions of the traditional robot control system service-oriented, and provides functions such as service registration, service combination and replacement, so that the whole system can greatly improve the system performance by directly adding and combining services. The efficiency...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More