

Method of improving density of three-dimensional reconstructed point cloud based on neighborhood block matching
A 3D reconstruction and block matching technology, applied in the field of computer vision, can solve problems such as insufficient point cloud quality, high requirements for the shooting environment, difficulty in coping with distance shooting, etc., to increase completeness and density, increase point cloud features, Improves the quality and consistency of the effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
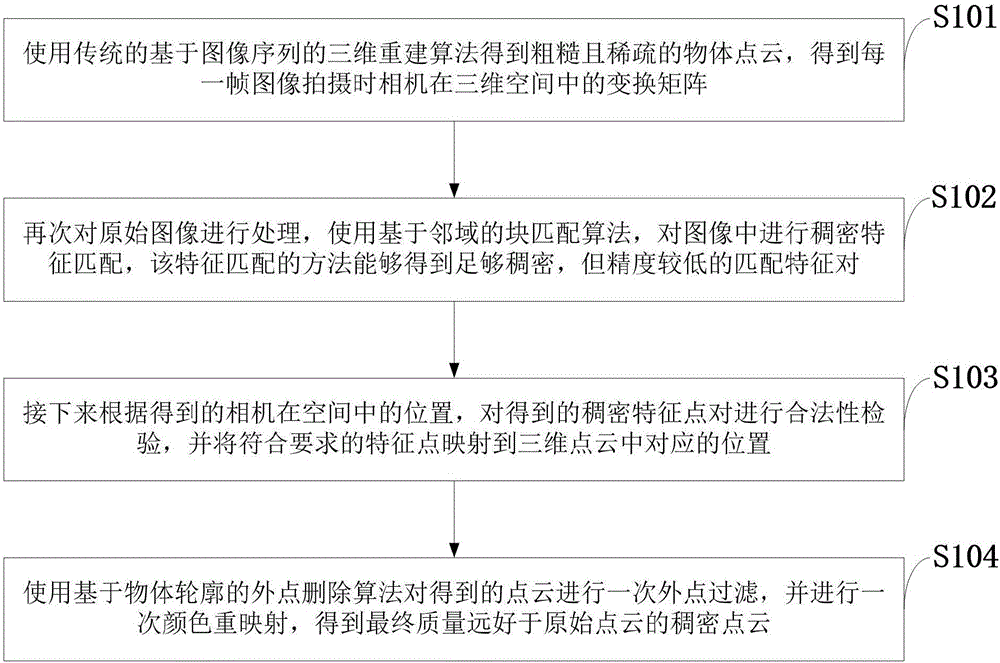
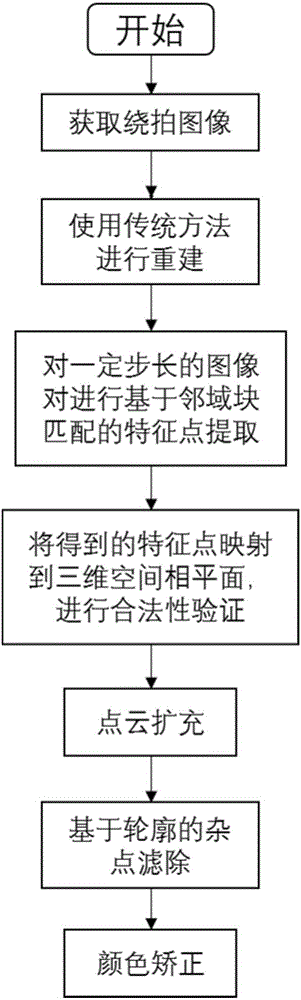
[0054] The method for increasing the density of the 3D reconstruction point cloud based on neighborhood block matching provided by the embodiment of the present invention includes the following steps:
[0055] Step 1: Shoot around the target object to obtain images from various angles.
[0056] Step 2: Use the traditional 3D reconstruction method based on the SIFT feature matching algorithm for reconstruction, and obtain the camera rotation matrix when shooting each frame.
[0057] Step 3: Determine the step size for image matching, and use the feature matching algorithm based on neighborhood block matching to extract dense matching feature points. The feature point extraction formula is described in detail in the description of S5.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More