

Ultra-elastic alloy slice mechanical arm
A superelastic alloy and manipulator technology, applied in the field of robotics, can solve the problems of restricting the research and popularization of serpentine manipulators, serious coupling of pull wire movement, and heavy driving mechanism, etc., to achieve improved control accuracy, simple structure, and motion accuracy high effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The present invention will be further introduced below in conjunction with the accompanying drawings.
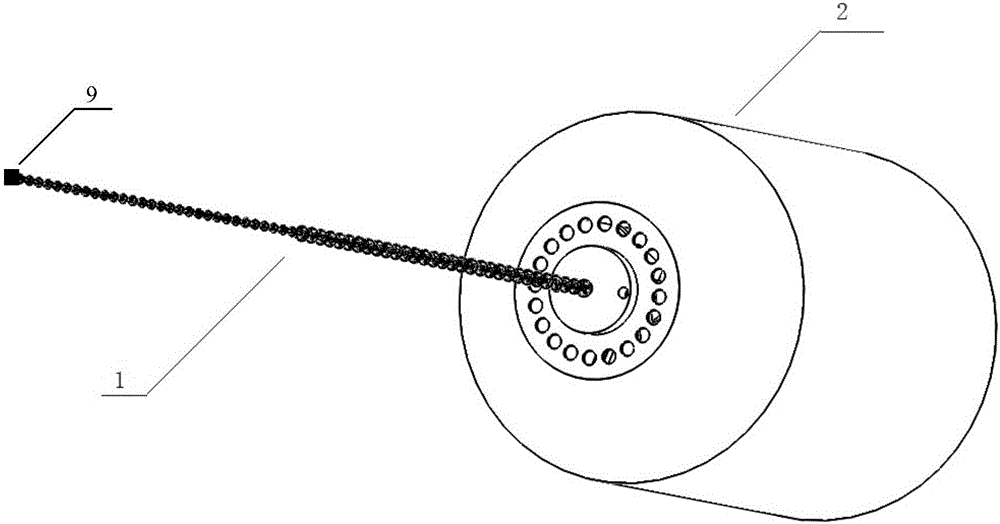
[0042] Such as figure 1 As shown, a superelastic alloy sheet mechanical arm is characterized in that it includes a mechanical arm joint body 1 and a driving mechanism 2 , and the mechanical arm joint body 1 and the driving mechanism 2 are mechanically connected by a pull wire 25 .
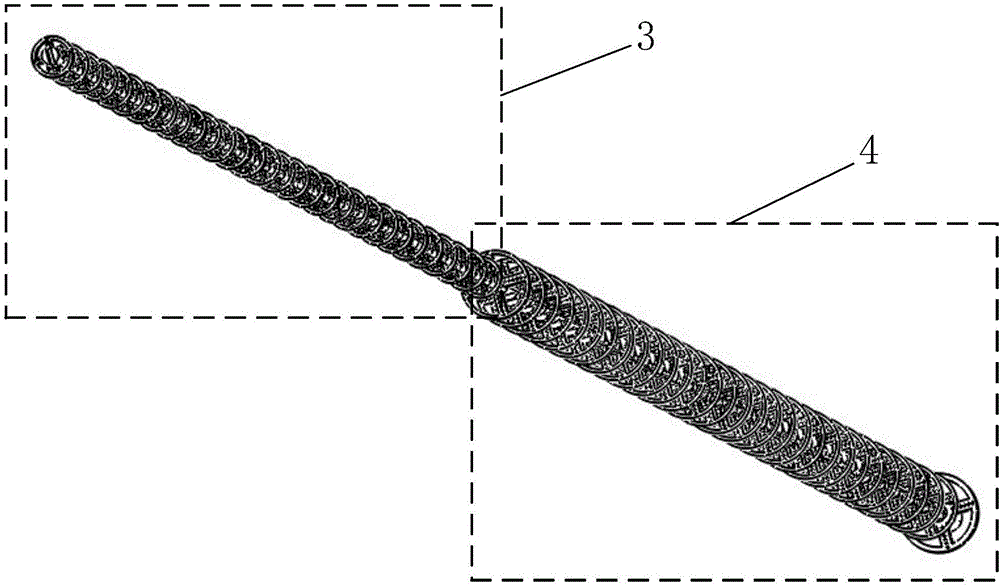
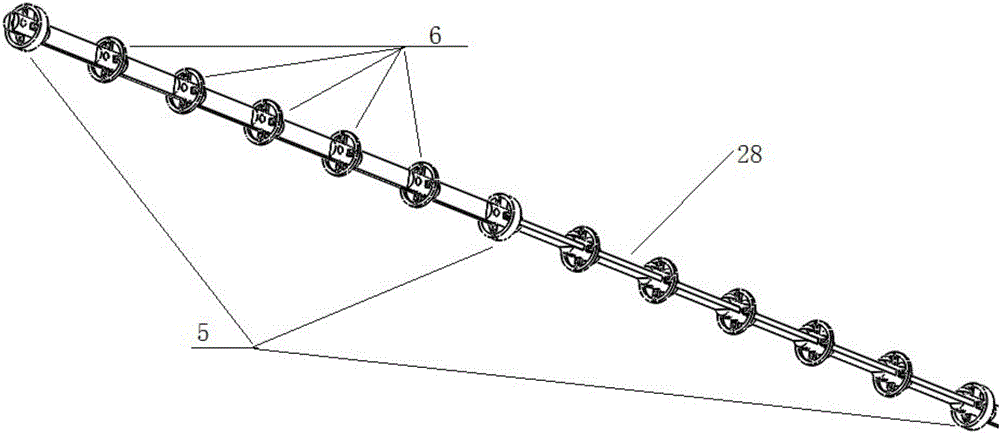
[0043] Such as Figure 2 to Figure 5 As shown, the joint body 1 of the mechanical arm includes a small joint body 3, a large joint body 4, a superelastic alloy sheet 28, a front-end camera 9 and a rivet 24; At the same time, in order to reduce the weight of the overall mechanical arm, a small joint body 3 with a smaller radius is used; the second half of the mechanical arm adopts a large joint body 4 with a larger radius due to the large number of backguys 25 passing through. Such as Figure 20 As shown, the front camera 9 can be replaced by other tools such as manipulators.
[0044] S...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More