

Robot object conveying method and control system based on ROS (Robot Operating System)
A technology of transmission control and robotics, applied in two-dimensional position/channel control and other directions, can solve problems such as distribution range restrictions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0028] Embodiment: the present invention provides a kind of robot article transmission method based on ROS, comprises the following steps:
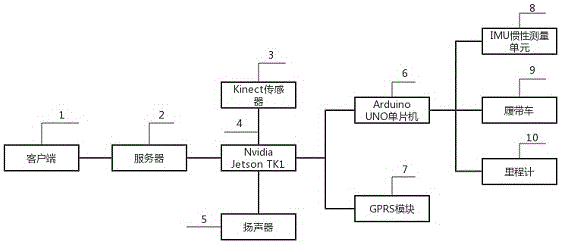
[0029] Step 1. Install the ROS operating system in Nvidia Jetson TK14, use Kinect3 to obtain RGB-D images with depth information, use RTAB-Map algorithm in ROS to process and establish a two-dimensional navigation map, and store the two-dimensional navigation map to Nvidia Jetson TK14;
[0030] Step 2. Enter your own location and destination location in Client 1, and send the location information to Server 2, and Server 2 sends the location information to Nvidia Jetson TK14;
[0031] Step 3. Nvidia Jetson TK14 matches the location information with the location data in the two-dimensional navigation map, and after obtaining the matching result, uses the Dijkstra algorithm to generate a planned path, and generates sequence operation instructions according to the planned path;
[0032] Step 4, Nvidia Jetson TK14 sends the generated sequence...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More