

Autonomous landing method of unmanned aerial vehicle based on vision/inertial navigation
A technology for autonomous landing and unmanned aerial vehicles, applied in the field of integrated navigation, which can solve the problems of error accumulation, not being able to be used alone, poor vertical positioning function, etc., and achieve the effect of improving real-time performance and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, and the present invention includes but not limited to the following embodiments.
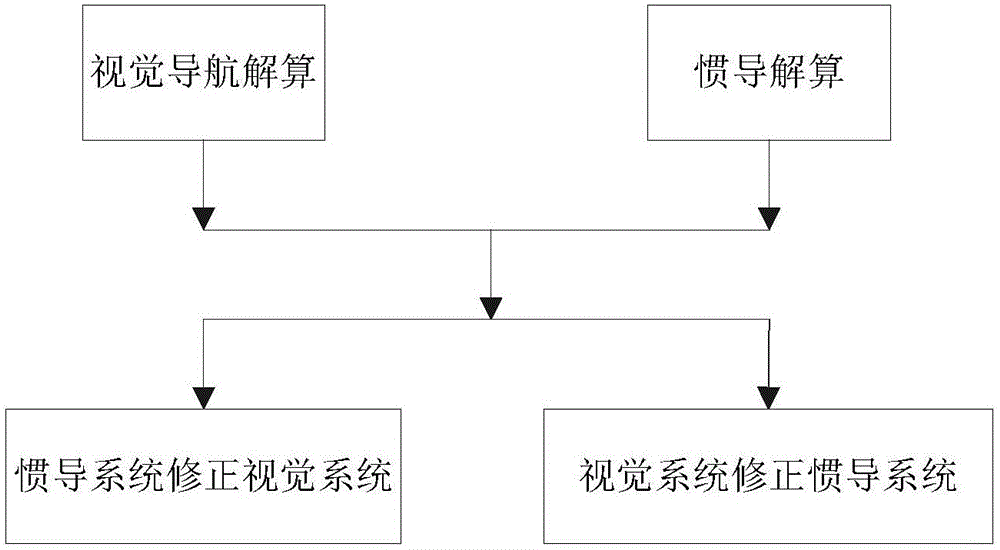
[0043] Combined navigation method of the present invention is according to following steps 1) to step 4) on the basis of cycle operation:
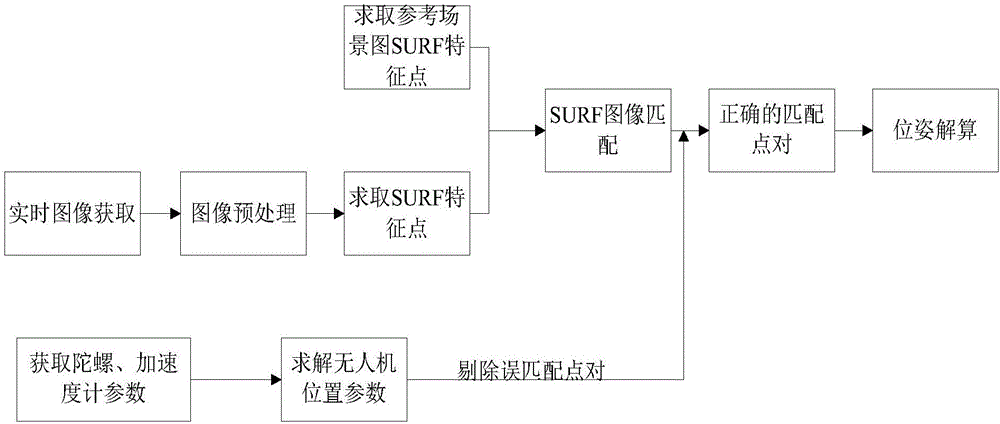
[0044] Step 1) Use the visual navigation algorithm to solve the position and pose of the drone, including 1.1) to 1.8);
[0045] 1.1) Utilize the UAV airborne camera to obtain real-time images, go to step 1.2);
[0046] 1.2) judge whether the real-time image acquired is the first frame image, if go to step 1.3), otherwise go to step 1.4);
[0047] 1.3) The image processing process of the first frame is as follows:
[0048] 1.3.1) Preprocessing the image acquired in real time, extracting the SURF feature points of the real-time image, and turning to step 1.3.2);
[0049] 1.3.2) carry out SURF matching with the SURF feature points extr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More