

Sampling inertial guidance-based visual IMU direction estimation method
A technology of direction estimation and inertial guidance, applied in computing, instrumentation, electrical digital data processing, etc., can solve problems such as low precision, long-term error accumulation, and time-consuming matching
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0067] The present invention will be further described in detail below in conjunction with the accompanying drawings and examples.
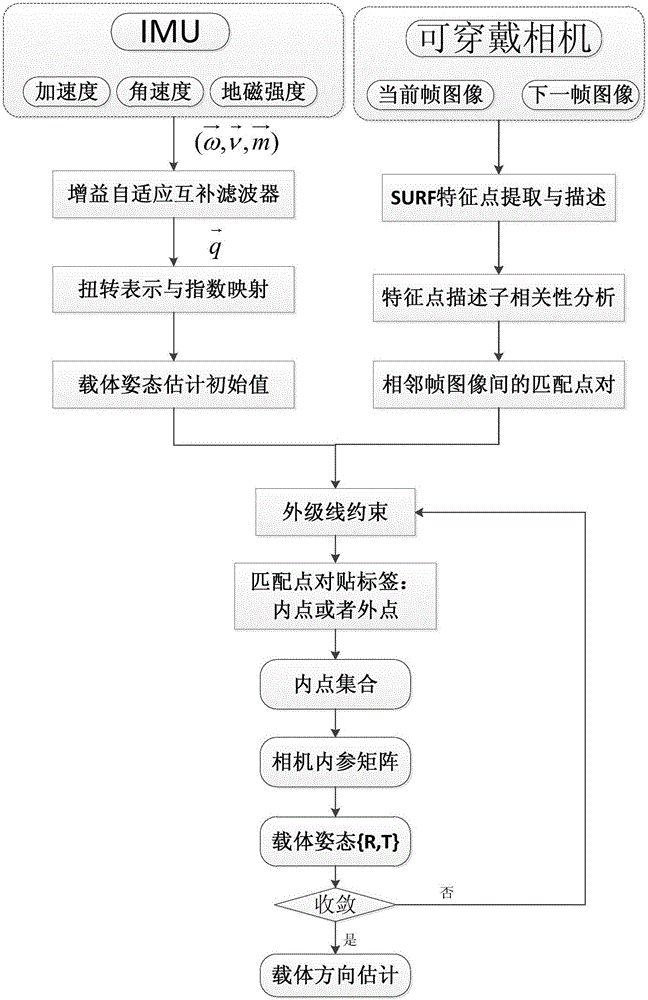
[0068] The present invention is mainly divided into three parts, figure 1 Shown is the principle diagram of the method of the present invention, and the specific implementation process is as follows.
[0069] Step 1: IMU orientation estimation based on gain-adaptive complementary filter.
[0070] The IMU contains three main sensors: a three-axis gyroscope, a three-axis accelerometer, and a three-axis magnetometer. The attitude estimation of the IMU includes the direction estimation of the three types of sensors, and their estimated values are fused.
[0071] Step 1.1: Compute the orientation estimate for the gyroscope.
[0072] Step 1.1.1: Solve the quaternion describing the direction of the IMU at time t+Δt The rate of change (also known as the derivative) The formula is as follows:
[0073]
[0074] Among them, the q in the quate...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More