Flexible robot vision recognition and positioning system based on depth learning
A robot vision and deep learning technology, applied in the field of flexible robot visual recognition and positioning system, can solve the problems of poor validity and adaptability of artificial features, poor adaptability, and low accuracy of flexible robot identification and positioning.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0058] The present invention will be further described in detail below in conjunction with the accompanying drawings.
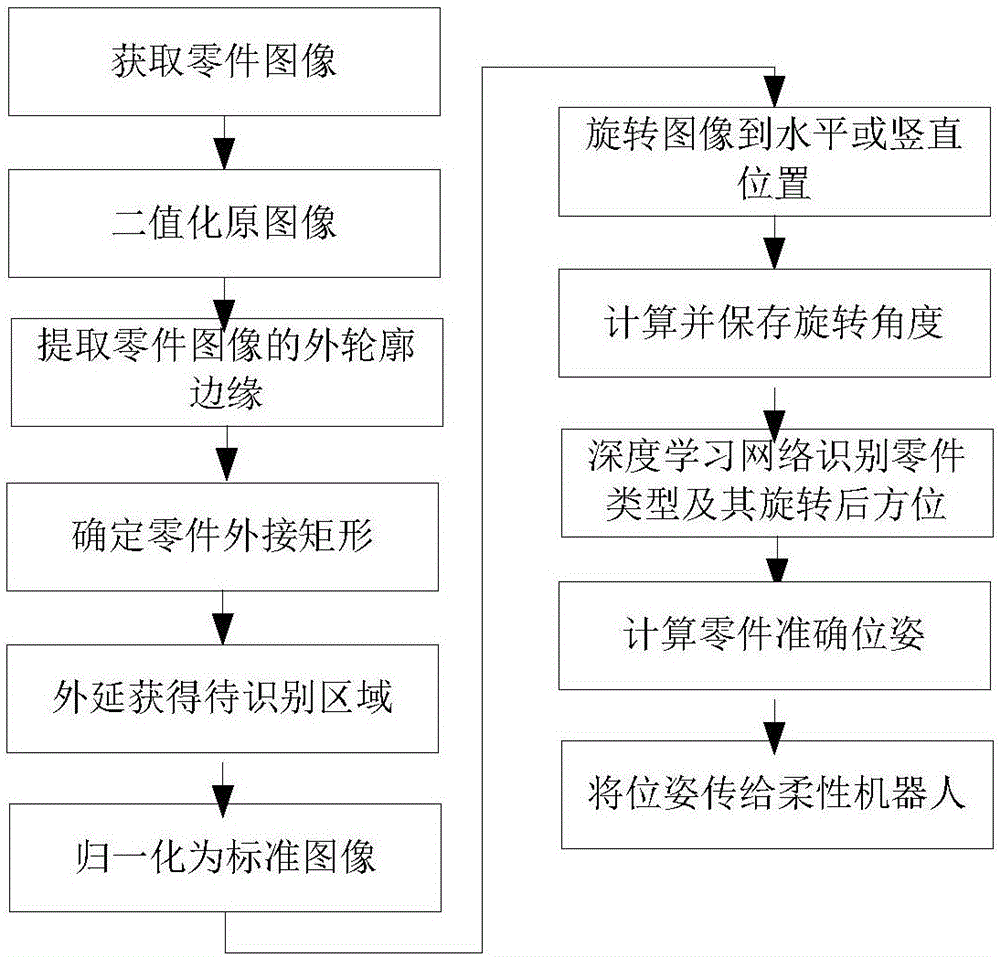
[0059] During specific implementation: if figure 1 As shown, it is the process of the flexible robot visual recognition and positioning system based on deep learning in this embodiment. Taking the flexible robot visual recognition and positioning system to identify and locate a certain type of part on the transmission device as an example, the specific implementation process is as follows:
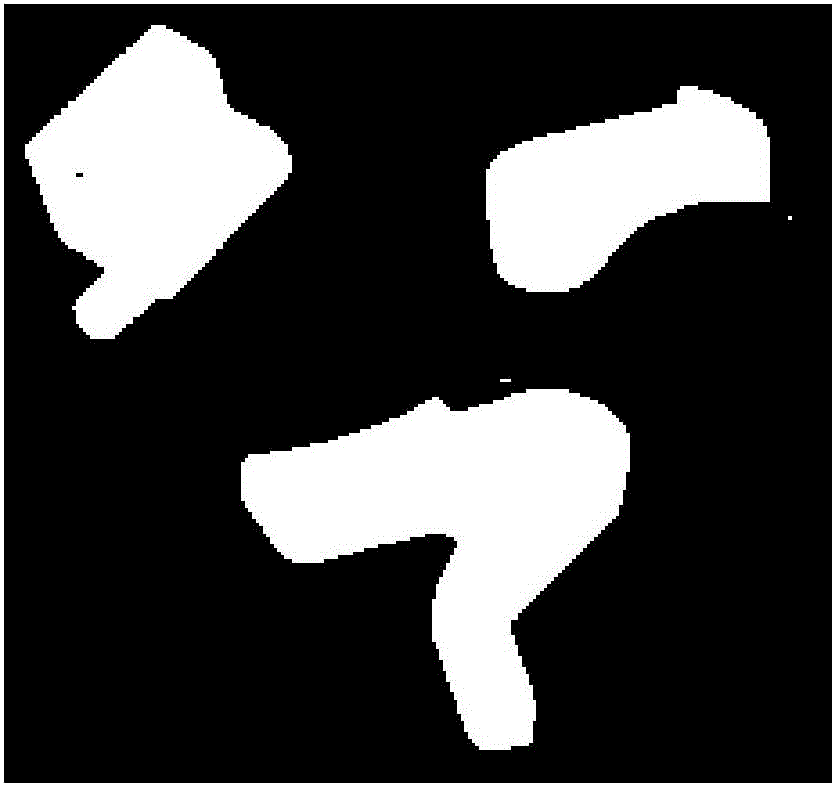
[0060] 1) Obtain the part image with a CCD camera, use a single threshold method to binarize the original image, and use the Roberts operator to extract the outer contour edge of the part image;
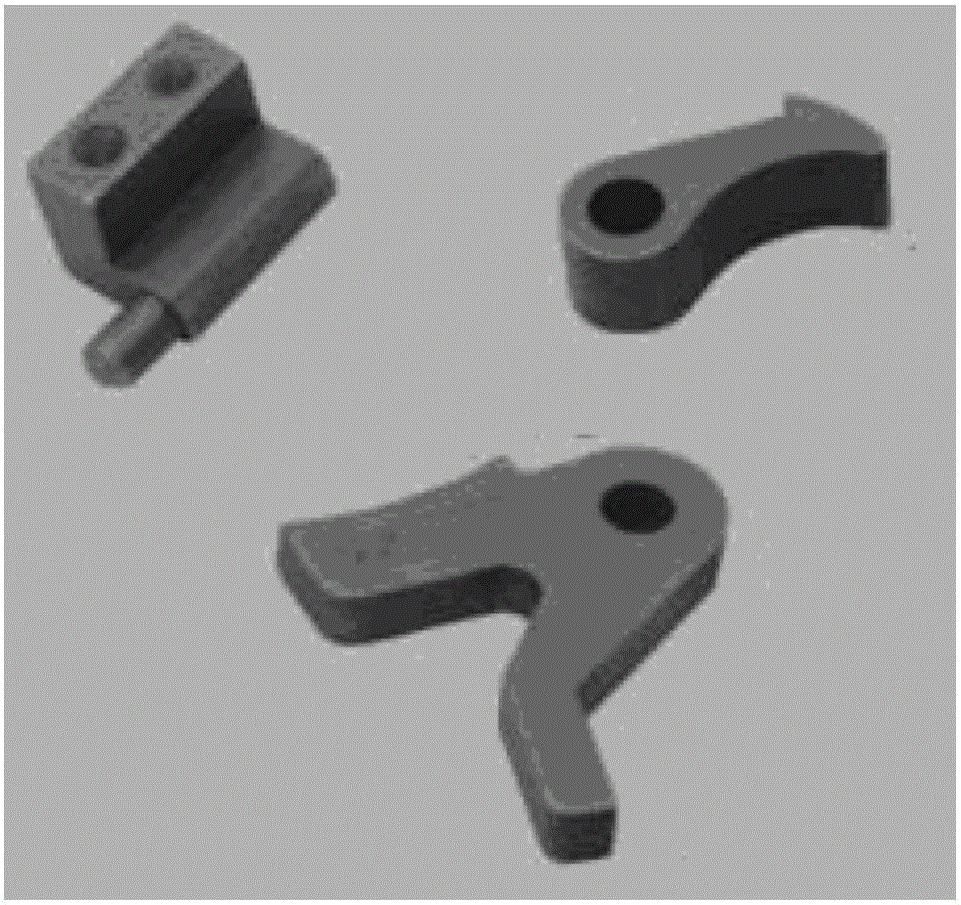
[0061] The system adopts Daheng DH-SV2001FM CCD camera, Computar M1614-MP2 industrial lens, EpVision EP-1394A dual-channel 1394A image acquisition card, and backlighting. Such as figure 2 Shown is the image of parts on the transmission device captured by a CCD camera. The par...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More