

Road condition sensing device and method and unmanned vehicle thereof
A technology for unmanned vehicles and road conditions, applied in the field of unmanned vehicles and road conditions sensing devices, can solve the problem that the built-in system can not well meet the unmanned driving and other problems.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0022] Embodiment 1: A road surface condition sensing device, the sensing device includes a wheel speed sensor, a vibration sensor and a signal processing unit, wherein the wheel speed sensor and the vibration sensor are connected to the signal processing unit through an electrical signal, and the signal The processing unit includes at least a central processing unit, a readable, writable and erasable memory chip, a temporary cache unit, and an output circuit. The result output.
Embodiment 2
[0023] Embodiment 2: A road surface condition sensing device, wherein the wheel speed sensor adopts a high-precision Hall-type ABS wheel speed sensor. The vibration sensor adopts one of a relative electric sensor, an eddy current sensor, an inductive sensor, a capacitive sensor, an inertial electric sensor, a piezoelectric acceleration sensor, a piezoelectric force sensor, and a resistive strain sensor. The structure and connection relationship of the remaining parts are the same as those described in Embodiment 1.
Embodiment 3
[0024] Embodiment 3: A kind of driverless car, this driverless car at least comprises steering wheel, master control system, engine, vehicle walking system, master control system includes automatic driving and manual driving two modes, in the vehicle of driverless car The walking system is equipped with a vibration sensor and a wheel speed sensor. The vibration sensor is located in the wheel. The signals of the vibration sensor and the wheel speed sensor are transmitted to the signal processing unit after passing through the signal amplification circuit and the filter circuit. After the signal processing unit processes the signal, the signal is processed. Feedback to the main control system of the driverless car, the main control system of the driverless car receives the signal and realizes avoidance by controlling the engine speed and the steering wheel.
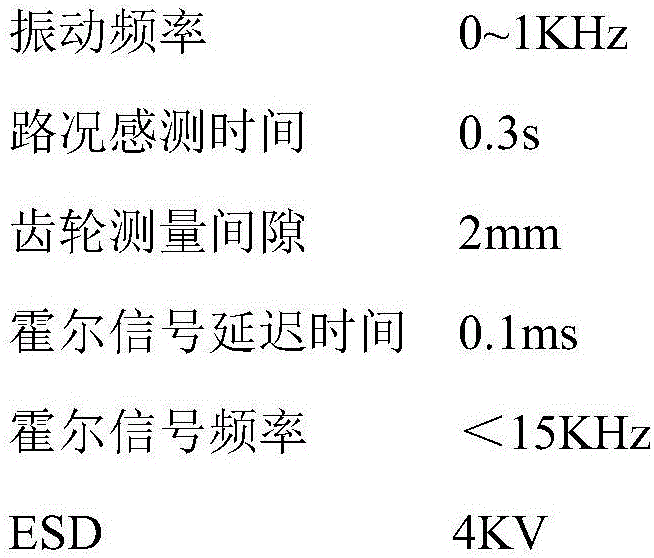
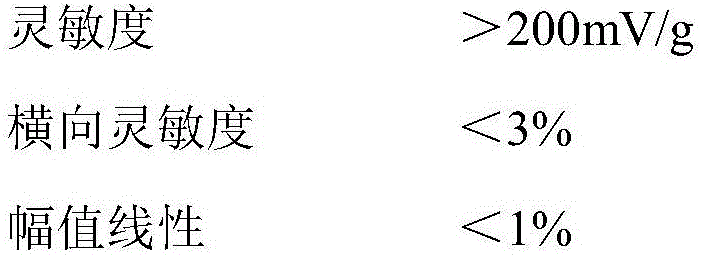
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More