

Vision based steady object tracking control system and method for rotor UAV (unmanned aerial vehicle)
A technology for unmanned and stable tracking of rotors, applied in the field of visual tracking, can solve problems such as the inability of rotorcraft to track moving targets stably, achieve smooth tracking flight process, ensure effect and accuracy, and avoid the effect of oscillation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
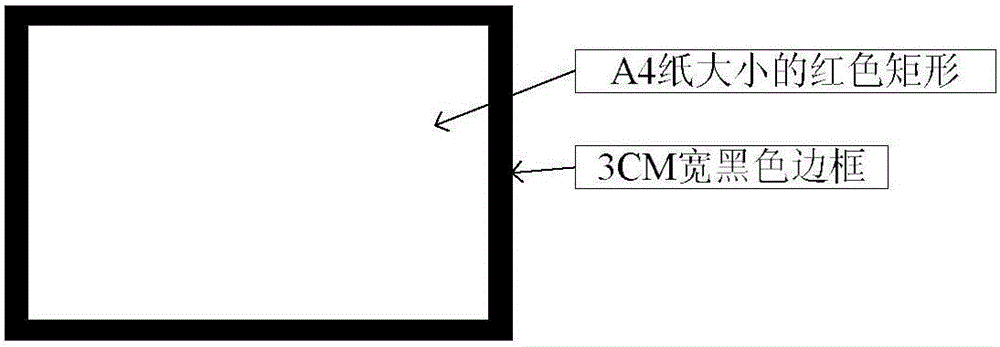
[0052] The present invention is designed as figure 1 The target feature flags are shown. The main body of the target feature mark is a red rectangle the size of A4 paper, its length and width are 297mm and 210mm respectively, the value corresponding to the RGB color is (255,0,0), and the periphery is a black border with a width of 3cm.
[0053] In the rotor UAV control system of the present invention, the flight controller is used as the "brain" of the rotor UAV, and is supplemented by the visual navigation module, sensor part, wireless communication unit, power unit and power supply module to complete tasks such as the stable visual tracking of moving targets by rotor UAVs.
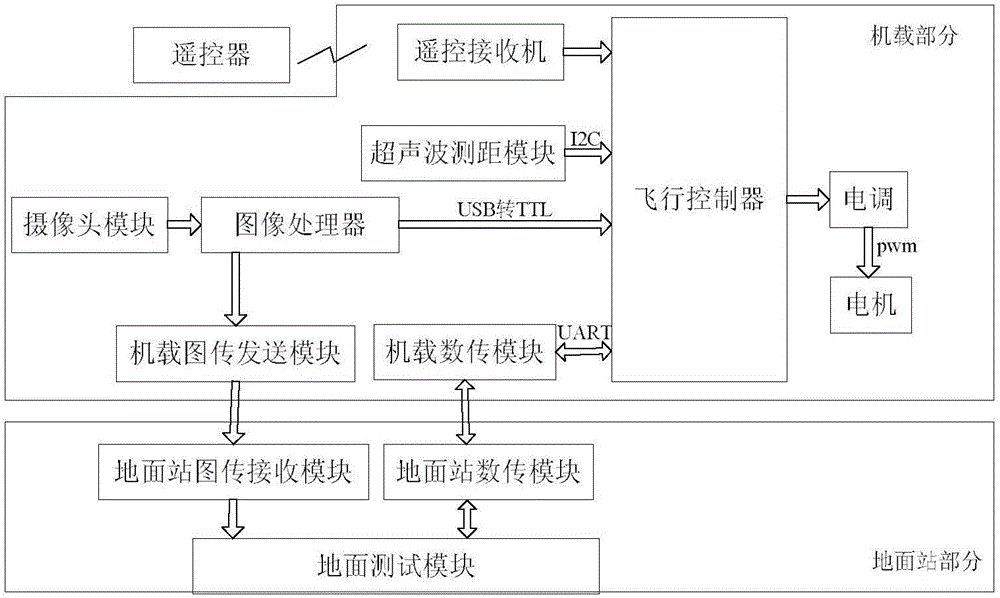
[0054] like figure 2 As shown, a vision-based control system for rotor UAVs to stably track moving targets mainly includes an airborne part and a ground station part. , ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More