

Network delay compensation method of two-input and two-output networked decoupling control systems
A dual-input, dual-output, decoupling control technology, applied in general control systems, control/regulation systems, adaptive control, etc., can solve problems such as system performance degradation, complex influence, and many uncertain factors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0132] The following will refer to the attached Figure 6 Exemplary embodiments of the present invention will be described in detail to make the above-mentioned features and advantages of the present invention more apparent to those skilled in the art.
[0133] The specific implementation steps are as follows:
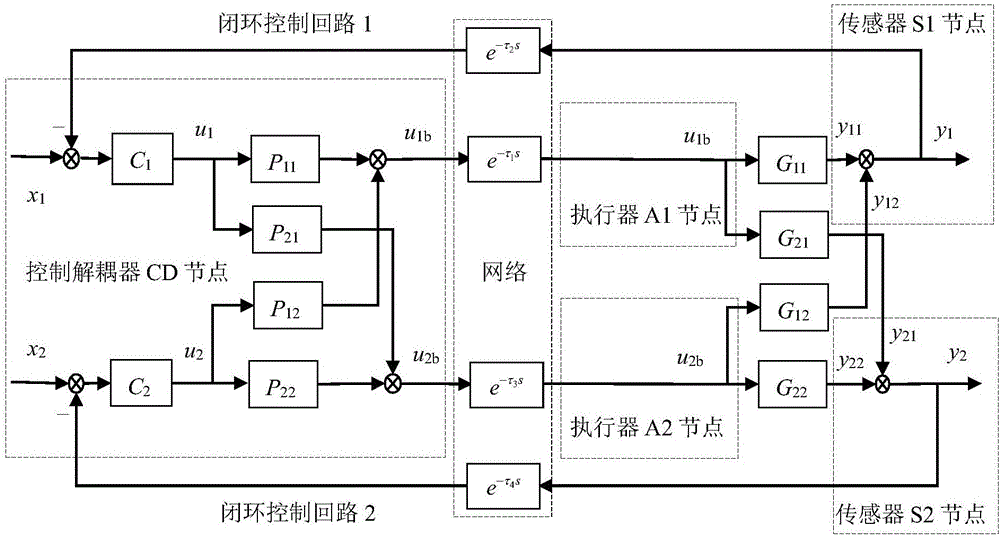
[0134] For closed loop control loop 1:
[0135] Step 1: The sensor S1 node works in a time-driven mode, and its trigger signal is period h 1 The sampling signal; when the sensor S1 node is triggered, the controlled object G 11 (s) output signal y 11 (s) and the controlled object cross-channel transfer function G 12 (s) output signal y 12 (s) Sampling and calculating the system output signal y of the closed-loop control loop 1 1 (s), and y 1 (s)=y 11 (s)+y 12 (s);
[0136] Step 2: The sensor S1 node will feed back the signal y 1 (s), transmitted to node C of the controller through the feedback network path of the closed-loop control loop 1, the feedback signa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More