

Vehicle yaw angle determination method based on Hough transform
A method for determining the yaw angle, which is applied in the field of vehicle active safety systems, can solve the problems of difficult detection and easy wear of lane lines, and achieve the effects of strong anti-interference ability, reliable detection results, and high recognition accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
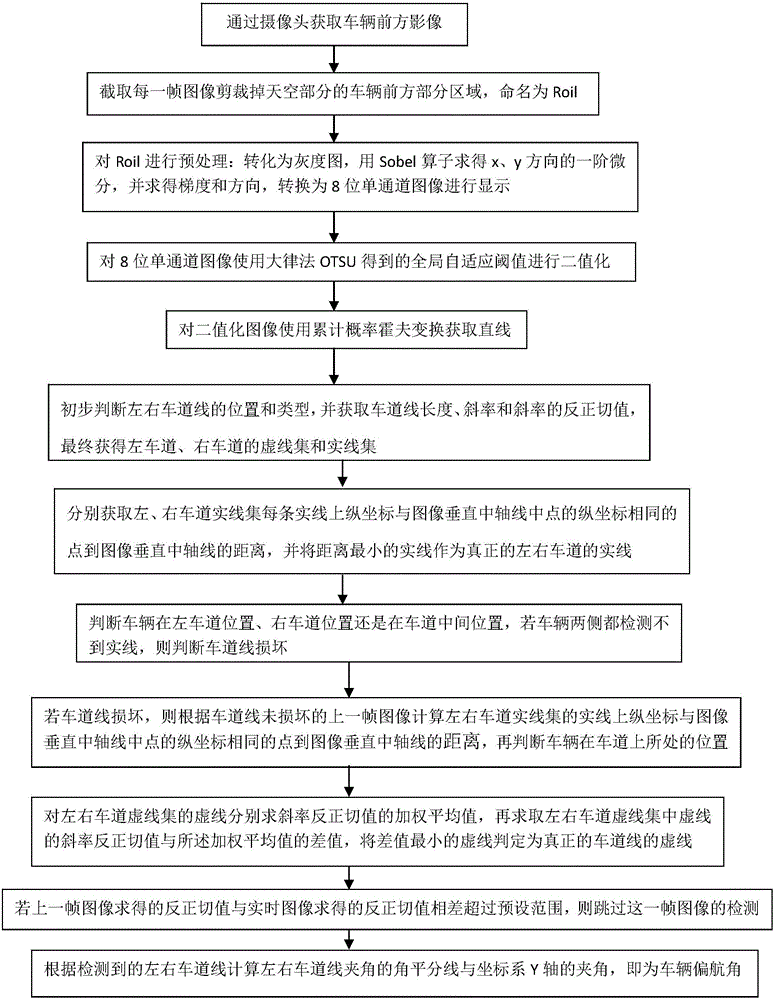
[0028] Such as figure 1 Shown, the present invention is based on the vehicle yaw angle determination method of Hough transform, comprises the following steps:
[0029] S1: Continuously acquire images in front of the vehicle through the vehicle camera with a resolution of 640x 480 pixels.
[0030] S2: Capture each frame of image and cut out the part of the vehicle in front of the sky part, named Roil. Cutting out the sky part in the image can make the subsequent distance calculation more accurate, such as the calculation in step S7.
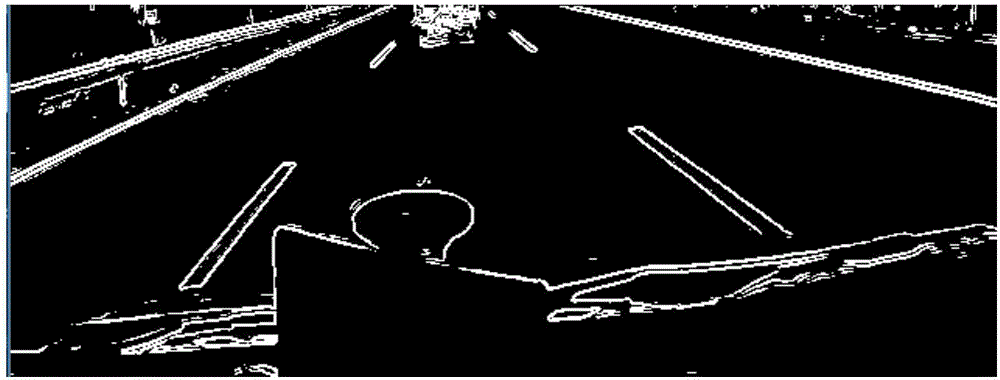
[0031] S3: Preprocessing Roil, which includes: converting the color image of Roil into a grayscale image, using the Sobel operator to obtain the first-order differential sobelx in the x direction and the first-order differential sobely in the y direction, and obtain the gradient and direction , converted to an 8-bit single-channel image for display.
[0032] S4: Binarize the 8-bit single-channel image converted in step S3 by using the global ad...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More