Industrial robot for X-ray detection
An industrial robot and robot technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of multiple raw materials, heavy industrial robots, complex control systems, etc., and achieve the effect of reducing weight and saving manufacturing materials
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
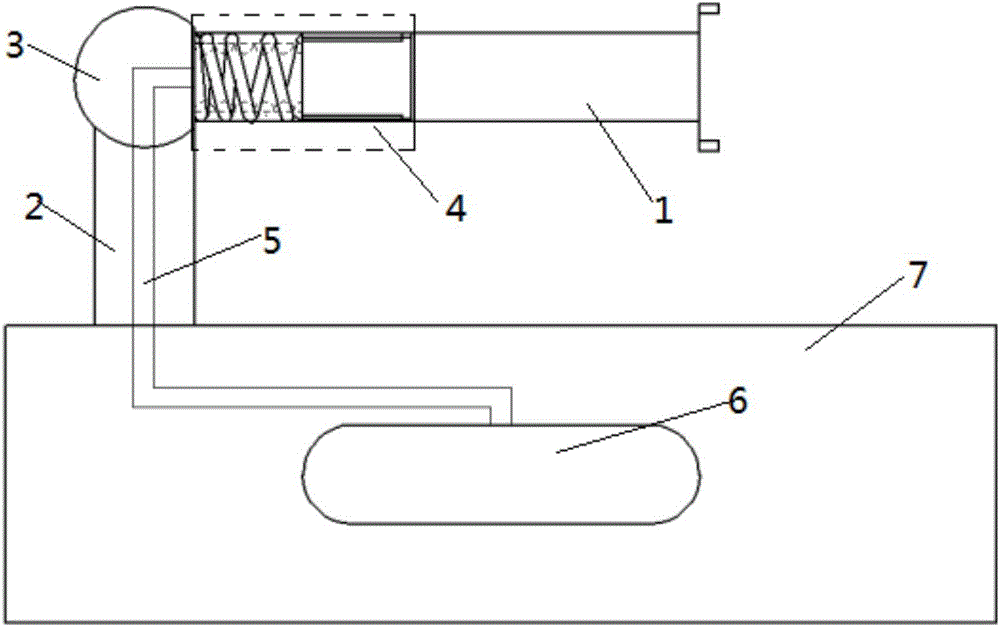
[0027] see Figure 1~2 , the application provides an industrial robot for X-ray detection, including an arm component, the arm component includes a first mechanical arm 1, a second mechanical arm 2 and a joint 3, and the end of the first mechanical arm 1 is provided with There is an auxiliary inflatable component 4 , which is connected to the second mechanical arm 2 through a joint 3 ; the auxiliary inflatable component 4 is connected to an air pump 6 through an air pipe 5 .
[0028] The specific working process of this application is as follows: when using the industrial robot involved in this application, when the first mechanical arm 1 needs to be extended, the auxiliary inflatable member 4 is inflated by the air pump 6 through the air delivery pipe 5, and the auxiliary inflatable member 4 is directed to The front movement drives the first mechanical arm 1 connected to it to move, and the extension of the first mechanical arm 1 can be realized; similarly, the air pump 6 is ...
Embodiment 2
[0031] see Figure 1~2 , the application provides an industrial robot for X-ray detection, including an arm component, the arm component includes a first mechanical arm 1, a second mechanical arm 2 and a joint 3, and the end of the first mechanical arm 1 is provided with There is an auxiliary inflatable component 4 , which is connected to the second mechanical arm 2 through a joint 3 ; the auxiliary inflatable component 4 is connected to an air pump 6 through an air pipe 5 .
[0032] Optionally, a base 7 is also included, and the air pump 6 is arranged in the base 7 .
[0033] The specific working process of the present application is as follows: when using the industrial robot involved in the present application, when the first mechanical arm 1 needs to be extended, the auxiliary inflatable member 4 is carried out by the air pump 6 arranged in the base 7 through the air delivery pipe 5. Inflated, the auxiliary inflatable member 4 moves forward to drive the first mechanical a...
Embodiment 3
[0036] see Figure 1~2 , the application provides an industrial robot for X-ray detection, including an arm component, the arm component includes a first mechanical arm 1, a second mechanical arm 2 and a joint 3, and the end of the first mechanical arm 1 is provided with There is an auxiliary inflatable component 4 , which is connected to the second mechanical arm 2 through a joint 3 ; the auxiliary inflatable component 4 is connected to an air pump 6 through an air pipe 5 .
[0037] Optionally, a base 7 is also included, and the air pump 6 is arranged in the base 7 .
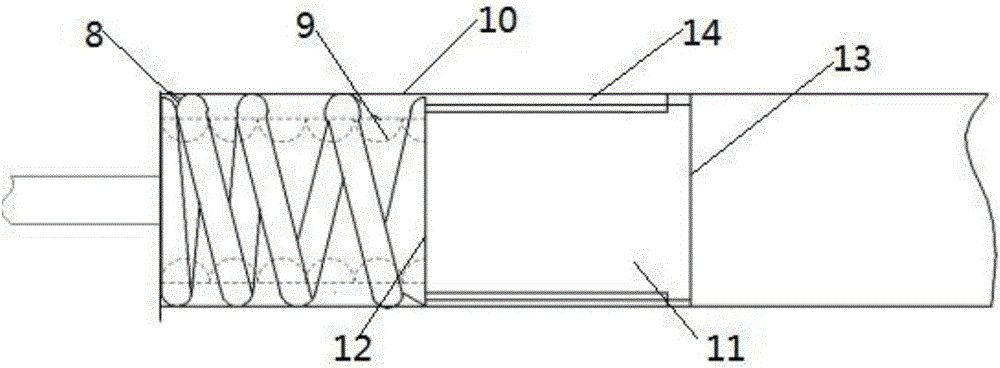
[0038] Optionally, the auxiliary inflatable member 4 includes a spring 8, an air bag 9 and a telescoping assembly.
[0039]The specific working process of the present application is as follows: when using the industrial robot involved in the present application, when the first mechanical arm 1 needs to be extended, the air pump 6 arranged in the base 7 is used to charge the auxiliary inflatable member 4 throug...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More