

Visual positioning and mechanical arm grabbing realization method based on ROS
An implementation method and a technology of a manipulator, which are applied in the directions of manipulators, program-controlled manipulators, and manufacturing tools, can solve the problems of high difficulty in development and use, poor adaptability of manipulators, etc., and achieve the effects of realizing layout, improving adaptability, and reducing use costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
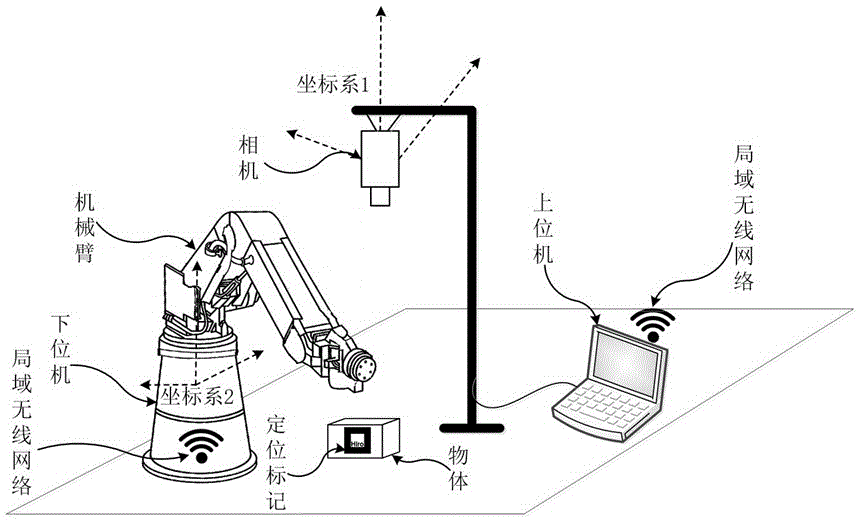
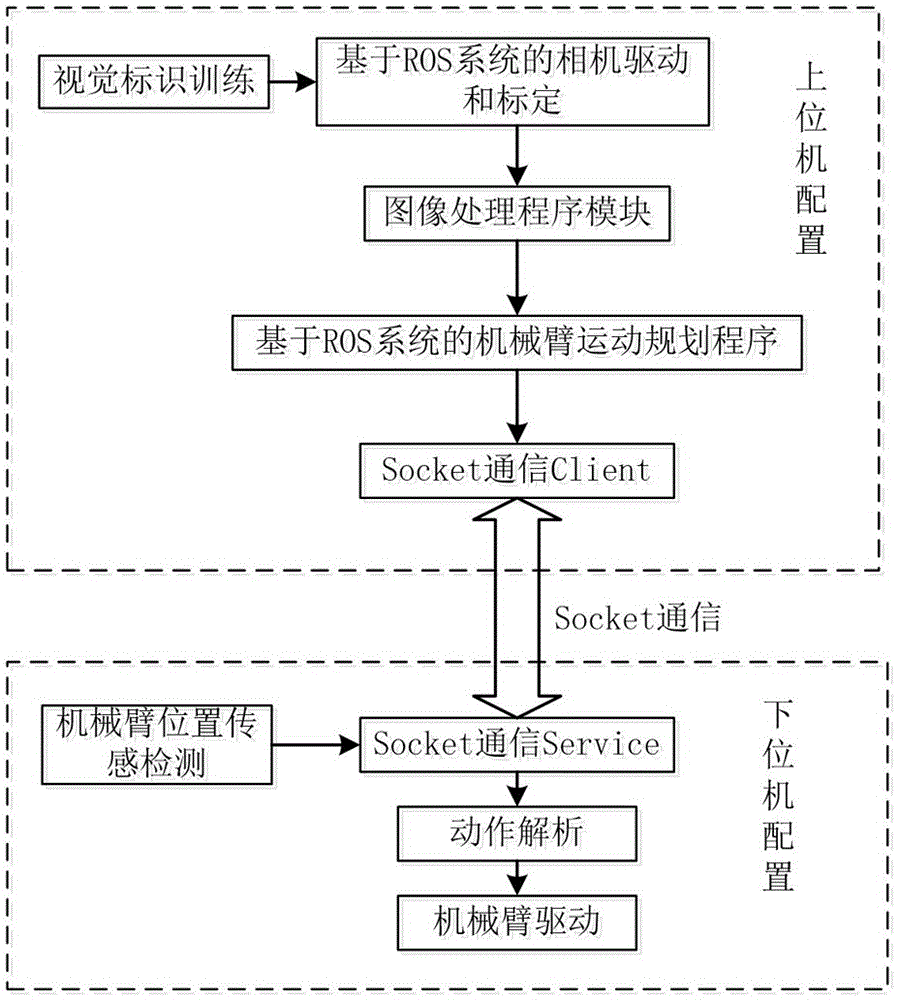
[0067] Such as figure 1 As shown, according to a preferred embodiment of the present invention, the ROS system-based monocular vision positioning and robotic arm grasping implementation method, the implementation environment includes the upper computer, lower computer and communication environment. The upper computer is the main body of image detection and image processing, and the lower computer is the main body of receiving commands and performing grasping, and they work together to complete the task of robotic arm grasping.
[0068] refer to figure 1 As shown in the schematic diagram of the implementation environment, the implementation environment of this embodiment consists of the following parts:
[0069] 1) USB camera. The camera is placed above or obliquely above the object to be captured. It is best to have a clear and unobstructed shooting angle, and it is necessary to specify the coordinate system where the camera is located ( figure 1 The coordinate system shown...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More