

Simple robot precision detecting device and method
A precision detection and robot technology, applied in the field of robot detection, can solve the problems of complex test methods and high theoretical requirements for testers, and achieve the effect of simple structure, low cost and convenient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0041] The principles and features of the present invention are described below in conjunction with the accompanying drawings, and the examples given are only used to explain the present invention, and are not intended to limit the scope of the present invention.
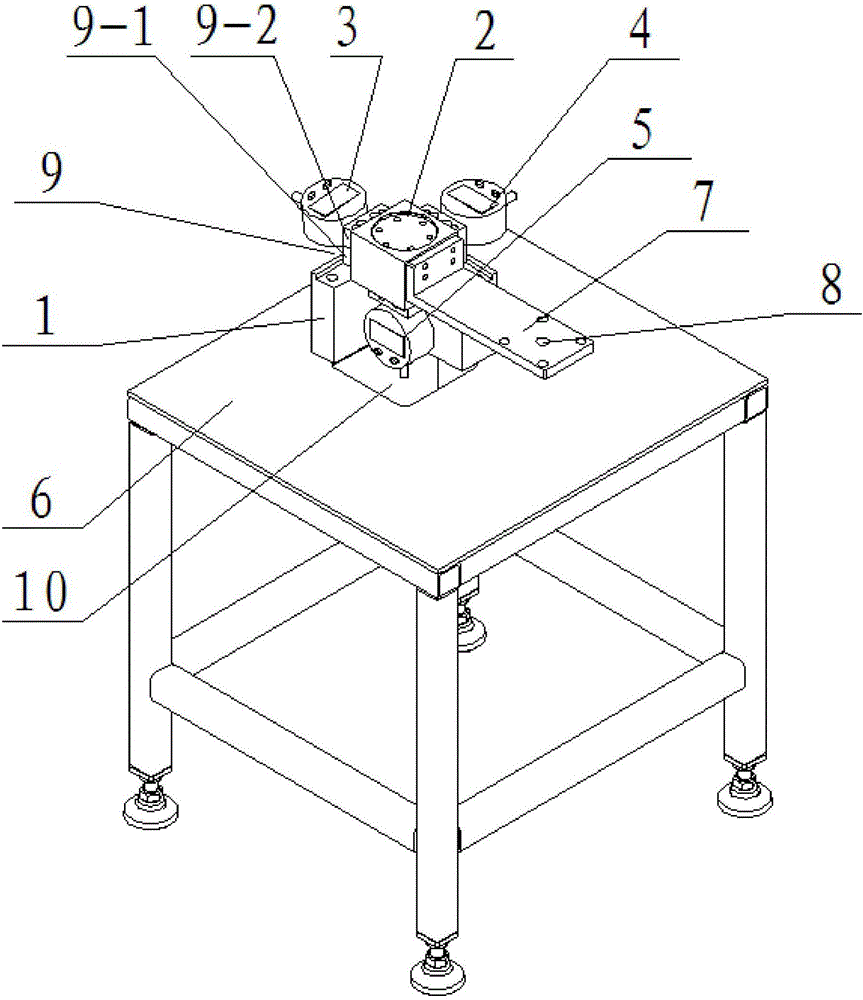
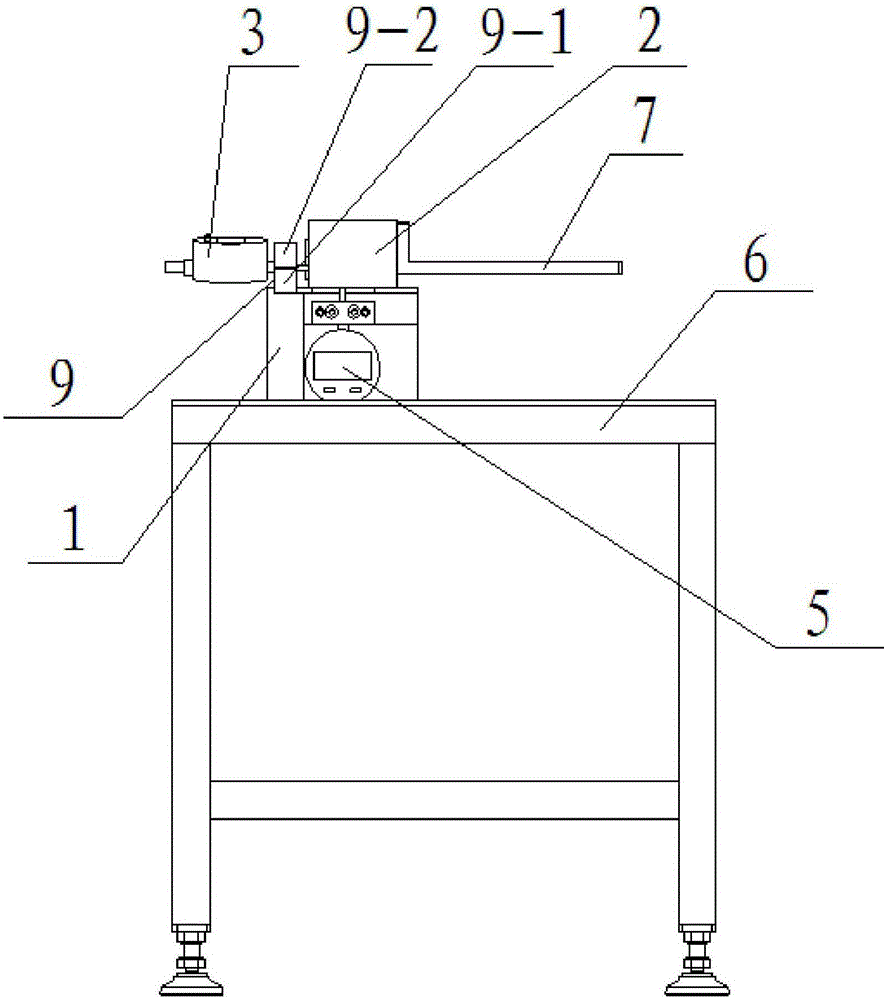
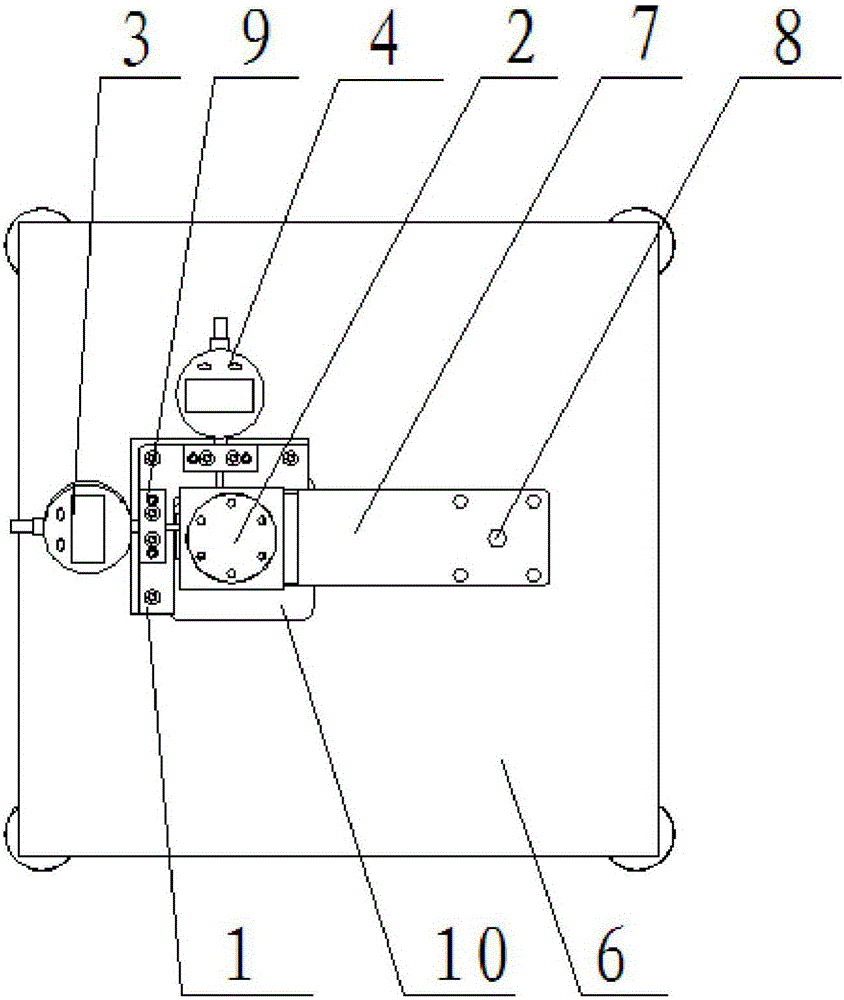
[0042] Such as figure 1 , figure 2 , image 3As shown, an embodiment of the present invention includes a fixed base 1 and a load block 2 for being installed on the end of the robot; the fixed base 1 is provided with an X-axis dial gauge 3 and an X-axis dial gauge 3 for detecting the horizontal position of the load block 2 Y-axis dial gauge 4, and Z-axis dial gauge 5 for detecting the vertical position of the load block 2, the axis of the measuring head of the X-axis dial gauge 3, the axis of the measuring head of the Y-axis dial gauge 4 And the axes of the measuring heads of the Z-axis dial gauge 5 are arranged perpendicular to each other; when the robot drives the load block 2 to move to the fixed seat 1, the lo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More