Method of processing flight path of unmanned aerial vehicle
A processing method and flight path technology, applied in the field of drones, can solve problems such as large amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0039] The present invention will be further described in detail below through specific embodiments in conjunction with the accompanying drawings.
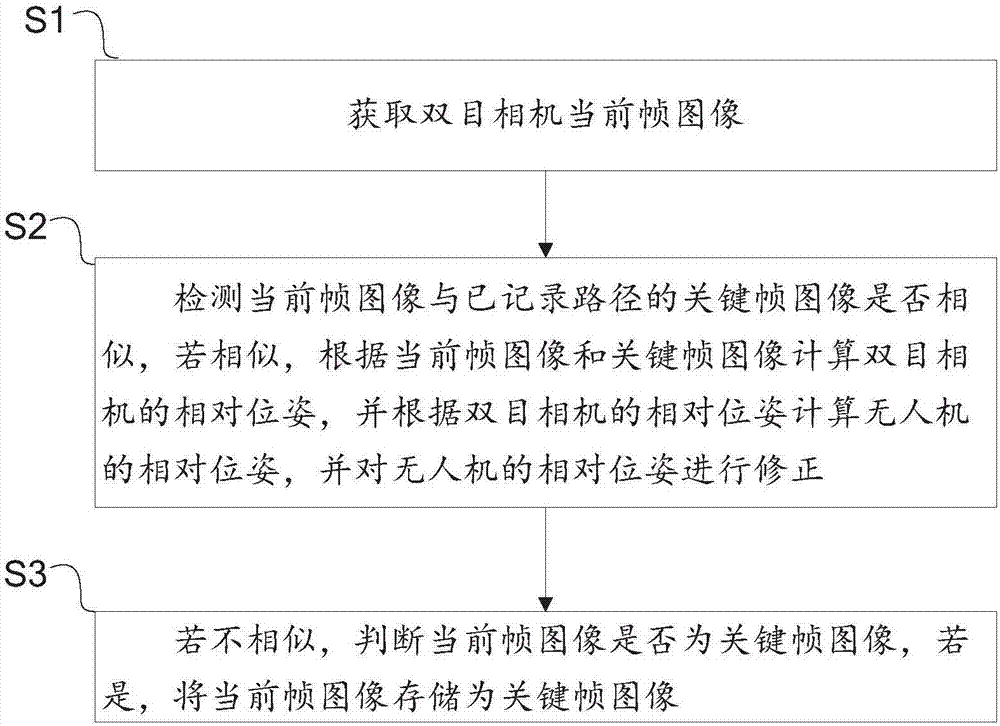
[0040] Aiming at the problem of path recording and playback of UAVs equipped with binocular cameras, this example provides a processing method for UAV flight paths. The flow chart is as follows figure 1 As shown, it specifically includes the following steps.
[0041] S1: Obtain the current frame image of the binocular camera.
[0042] Since the UAV is fixedly equipped with a binocular camera, the binocular camera includes a left camera and a right camera. When the UAV is flying, the current frame image of the binocular camera can be obtained, and the flight path of the UAV can be calculated according to the current frame image. Treat accordingly.
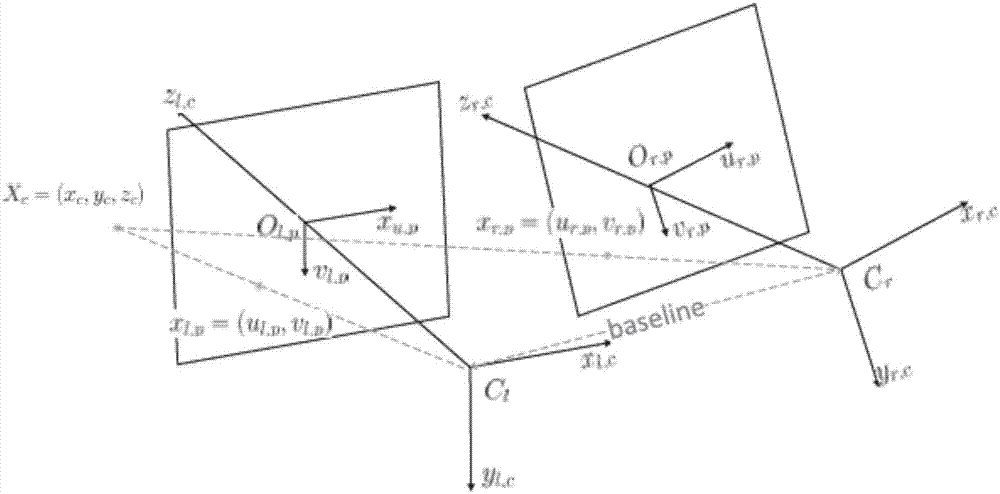
[0043] In this example, it is assumed that the obtained current frame image is already a de-distorted image, and the world coordinate system is set as The camera coordinate system i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More