

Double-arm-cooperative cleaning robot
A robot and dual-arm technology, applied in manipulators, manufacturing tools, etc., can solve the problems of low table cleaning efficiency, long waiting time for customers, insufficient number of employees, etc., and achieve the effect of perfect function, fast speed and high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
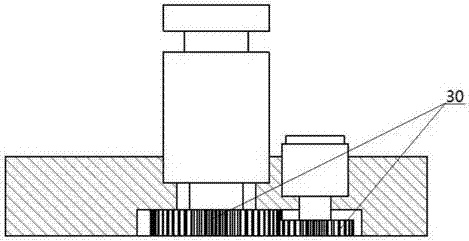
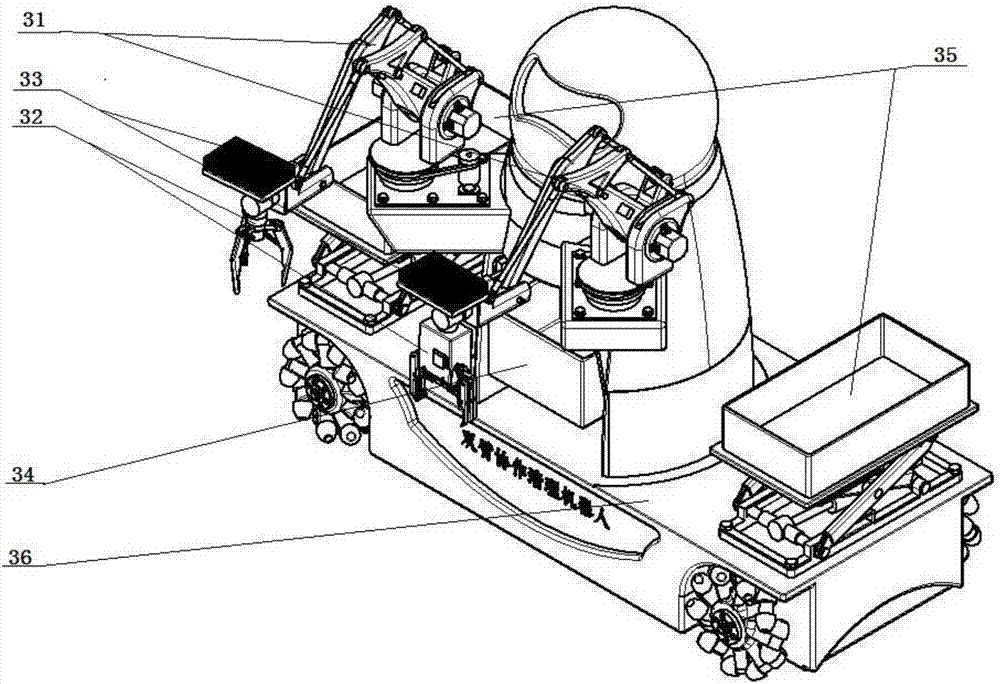
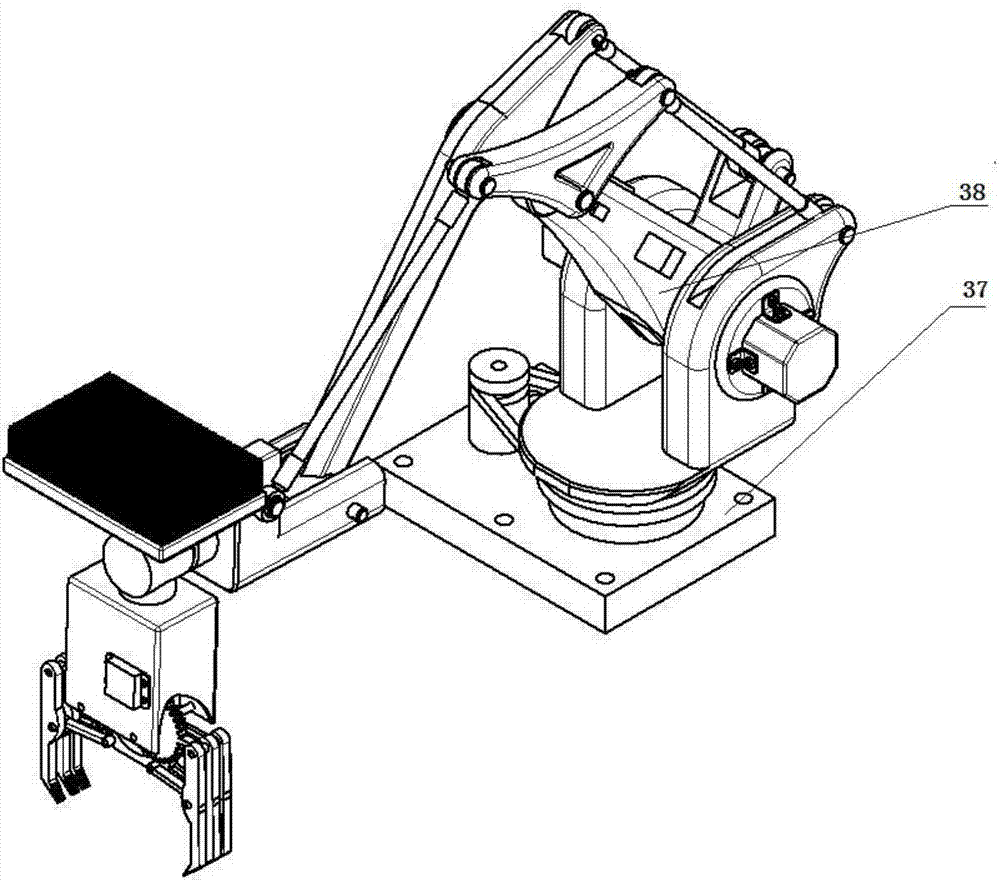
[0028] Such as figure 1 , 2 As shown, the embodiment of the present invention provides a dual-arm cooperative cleaning robot including: a grabbing and cleaning module composed of a mechanical arm (31), a grabbing gripper (32), and a cleaning brush (33), and a garbage collection module. Garbage bin (34), lifting platform (35) for holding tableware and chassis (36) for moving; Wherein, robot adopts double-arm rotating structure, lays two four-axis on two bases (37) Robotic arm (38), the three-claw gripper on one mechanical arm is driven by the cylinder to grip bowls and dishes, and then uses the waist rotation to transport the bowls and dishes to the lifting table for holding tableware; at the same time, the other mechanical arm The two claws on the top are driven by gears to pick up chopsticks and spoons, and then use the waist rotation to transport the chopsticks and spoons to the lifting platform for tableware. After that, the cleaning brush and mechanical claws are exchange...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More