Novel six-degree-of-freedom parallel platform
A degree of freedom and parallel technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of poor structural rigidity, poor transmission accuracy, and many transmission links, and achieve less cumulative error, high precision, and increased structural rigidity. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] Embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
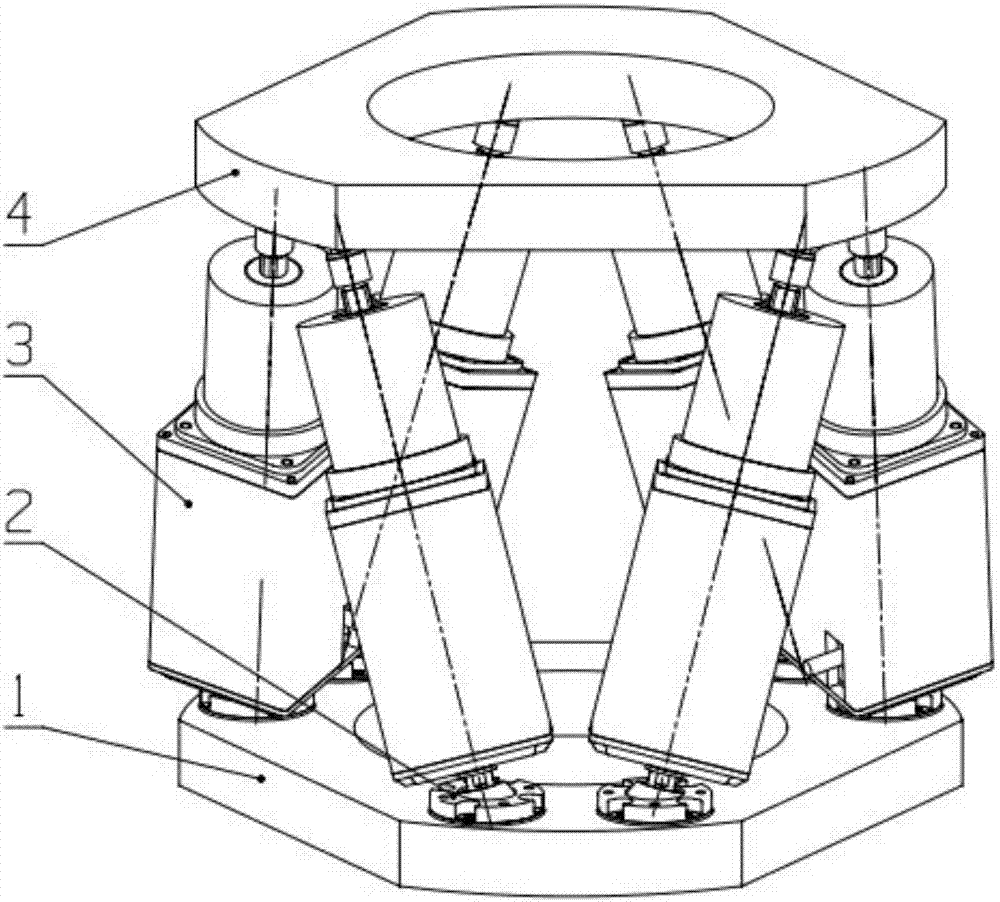
[0016] See attached figure 1 And attached figure 2 , a novel six-degree-of-freedom parallel platform of the present invention includes:
[0017] static platform 1;
[0018] A moving platform 4 arranged coaxially and parallel to the static platform 1;
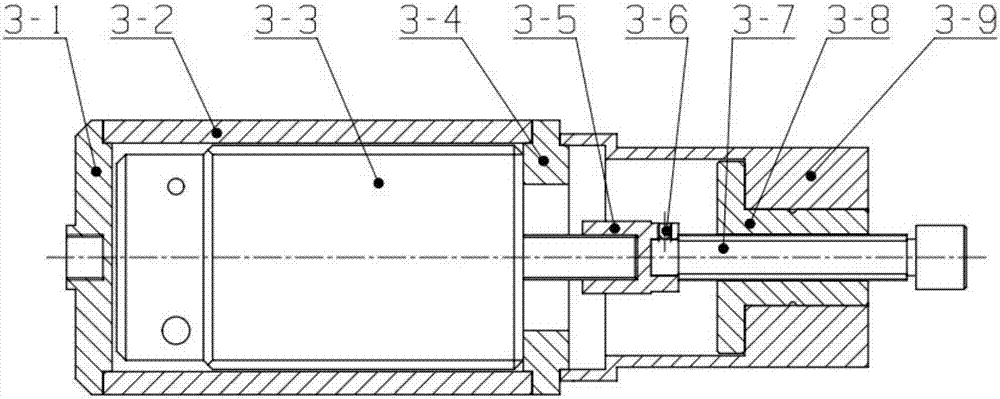
[0019] And six linear drive assemblies 3 arranged between the static platform 1 and the dynamic platform 4, the two ends of each linear drive assembly 3 are respectively connected with the lower end surface of the dynamic platform 4 and the upper end surface of the static platform 1 through the ball joint 2, and the straight line The drive assembly 3 includes an end cover 3-1, a motor protective case 3-2, a piezoelectric linear motor 3-3, a motor fixing plate 3-4, a shaft coupling 3-5, a ball spline shaft 3-7, and a ball spline Female 3-8 and spline fixed housing 3-9, the piezoelectric linear motor 3-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More