

Knee joint structure for lower extremity exoskeleton robot
An exoskeleton robot and knee joint technology, applied in the field of robotics, can solve the problems of bulky thigh drive sprocket structure, increased overall weight of the exoskeleton, power consumption, and large volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in detail below in conjunction with the drawings.
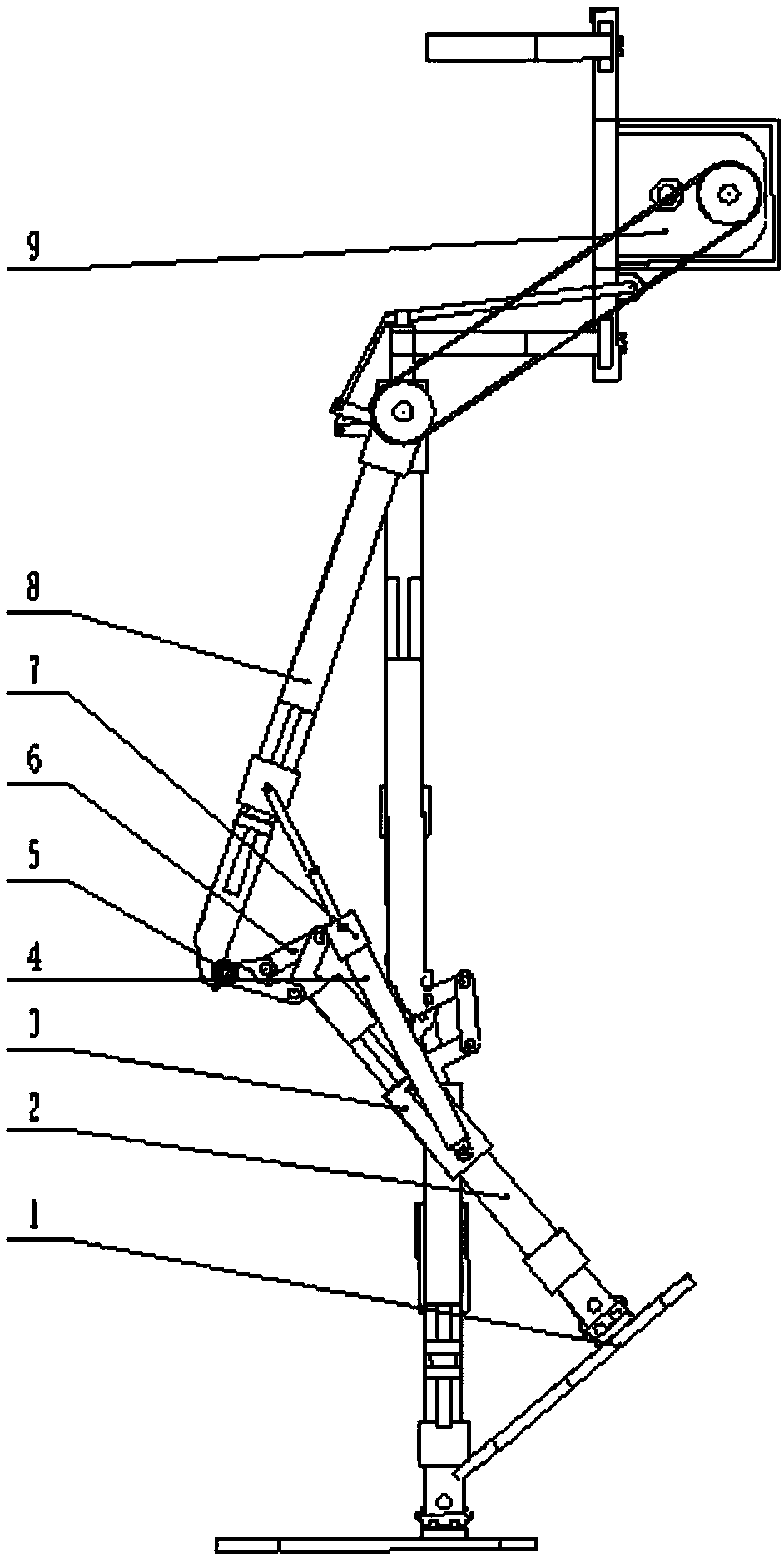
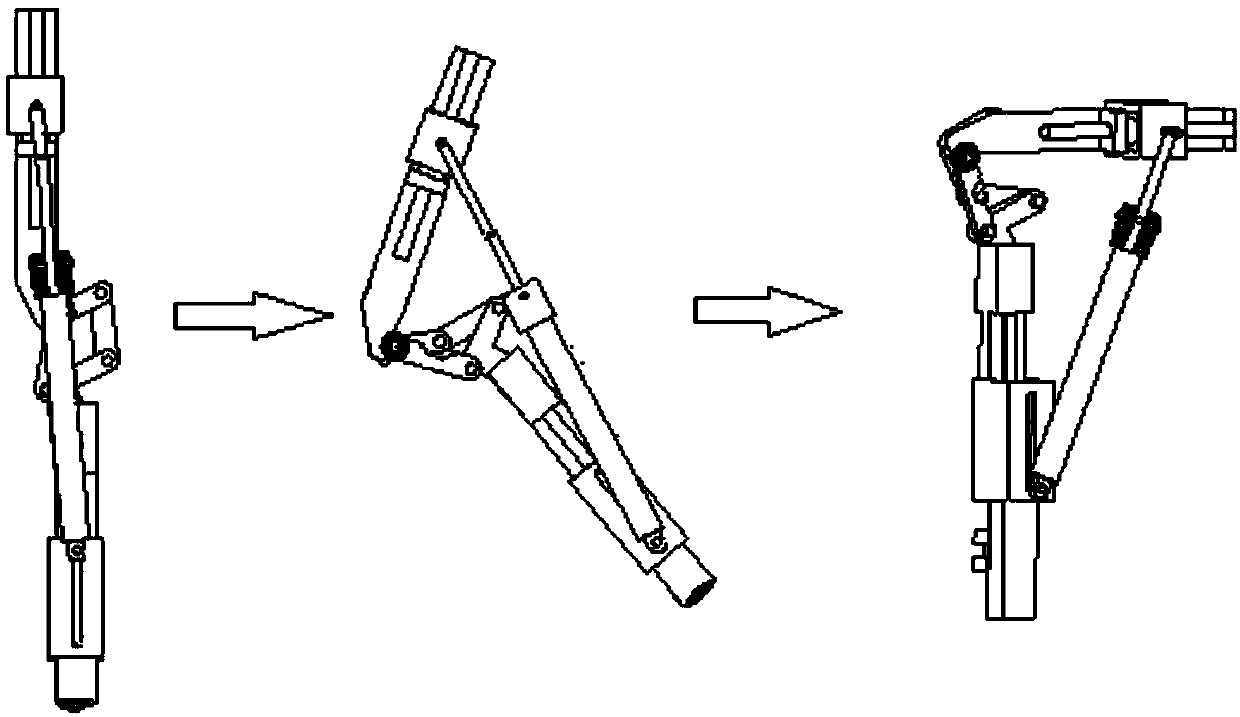
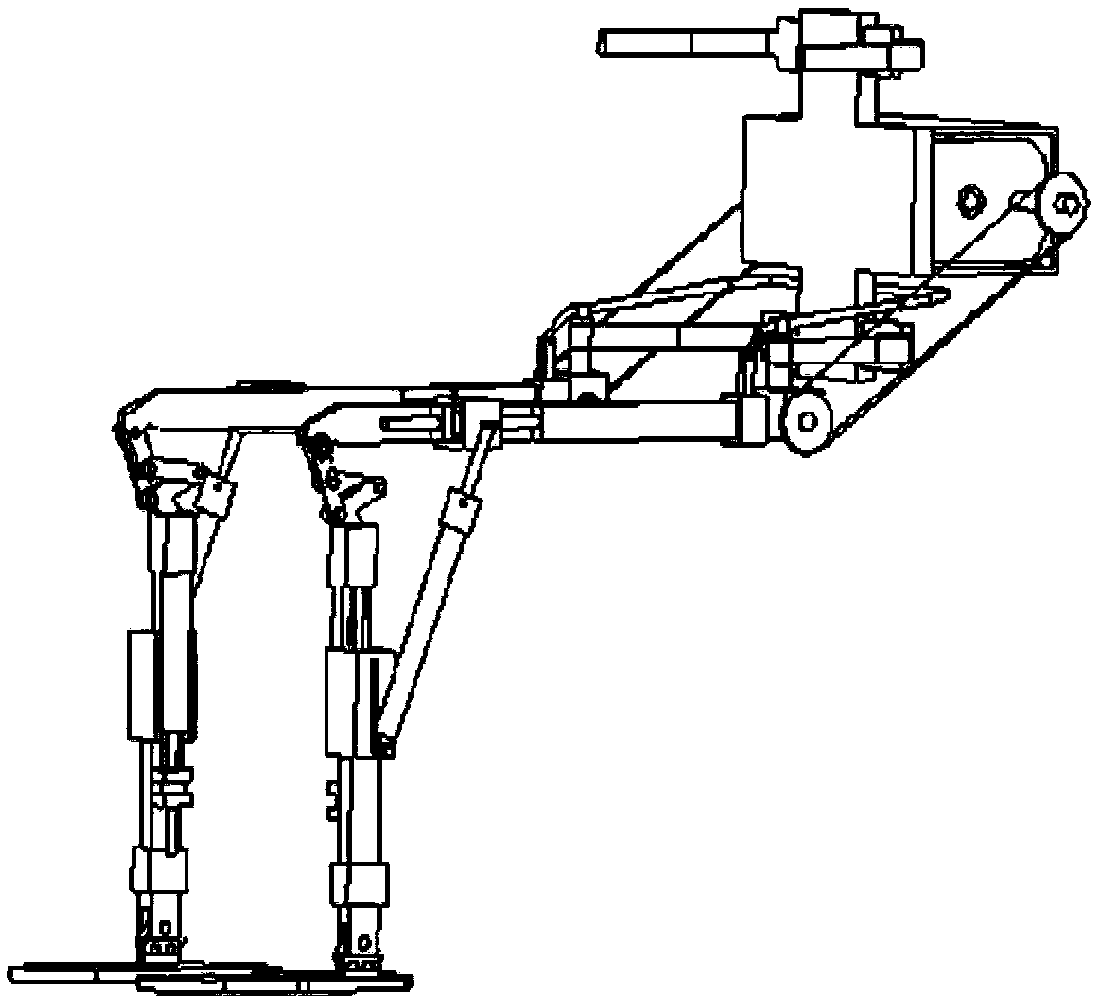
[0022] Such as Figure 1 to Figure 4 As shown, the present invention provides a knee joint structure for a lower limb exoskeleton robot, which includes a foot plate 1, a calf assembly 2, a gas spring chute mechanism 3, a gas spring 4, a booster leaf spring 5, and a four-link knee joint 6, Gas spring locking mechanism 7, thigh assembly 8, hip joint drive motor 9.
[0023] The calf assembly 2 and the thigh assembly 8 are connected by a four-bar knee joint 6, and a gas spring 4 is also installed between the calf assembly 2 and the thigh assembly 8. One end of the gas spring 4 is connected to the thigh assembly 8, and the other end is connected to the thigh assembly 8. The gas spring chute mechanism 3 fixed on the calf assembly 2 is slidably connected, and the gas spring 4 is used to realize the power assist when the posture changes from standing to sitting and from sitting to standing. ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More