

Crane movement track recognition method
A technology of movement trajectory and recognition method, which is applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as the gap in the environmental noise of manipulators, and achieve the effect of ensuring rigor
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0012] In the control of the manipulator, the joint rotation variable is the control variable, which determines the actual position and attitude of the end effector of the manipulator. In the process of solving the inverse kinematics of the manipulator, due to the deviation between the real kinematic parameters and the designed theoretical parameters, the joint rotation variables calculated by the inverse solution cannot make the end effector reach the ideal pose. Assuming that the real kinematic parameters are the design values, and the pose error is only caused by the rotation variable, the genetic algorithm is proposed to compensate the rotation variable to improve the positioning accuracy of the manipulator. The process of manipulator pose error compensation is divided into the following steps:
[0013] First, determine the kinematics model of the six-degree-of-freedom manipulator.
[0014] Collect multiple sets of data as samples. Randomly select multiple sets of poses ...
Embodiment 2
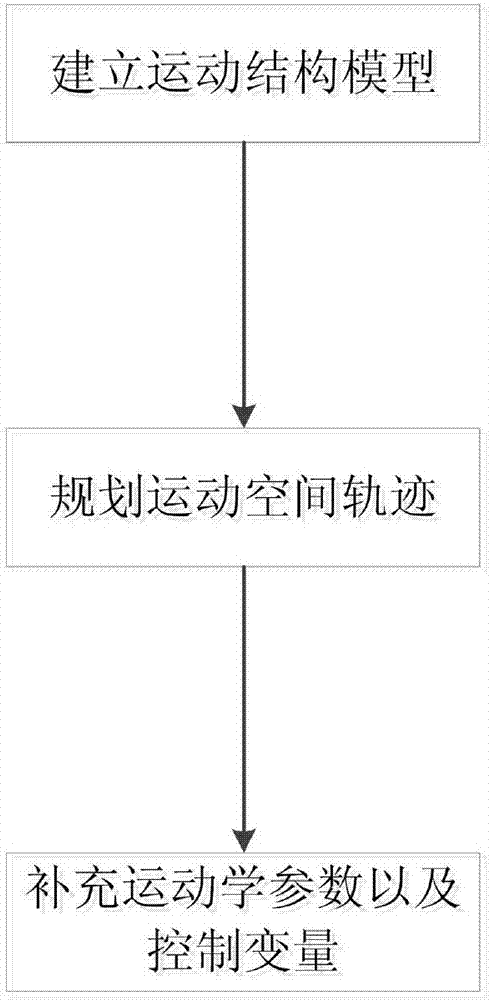
[0019] To establish a kinematic structure model, firstly analyze the kinematics of the mechanical arm of the crane, solve the homogeneous transformation matrix of the adjacent joints in the mechanical arm of the crane under different joint connection forms, and calculate the positive kinematics of the mechanical arm of the crane equation, and then use analytical method and numerical method to solve the inverse kinematics of the crane's mechanical arm, and combine the two to establish the kinematic structure model of the crane;
[0020] Plan the motion space trajectory, based on the motion structure model of the crane, record the parameters of the basic elements such as the space line and arc of the crane’s mechanical arm, plan the motion trajectory of the crane’s mechanical arm in Cartesian space, and After obtaining the motion trajectory of the task space, convert it to the joint space of the crane’s mechanical arm, and obtain the time series values corresponding to the posi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More