

Positioning routing method and device based on ultrawideband signal
An ultra-broadband, path-finding technology, used in positioning, measuring devices, instruments, etc., can solve the problems of inability to find the path of the target outside the line of sight, limited robot application scenarios, and low positioning and path-finding accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
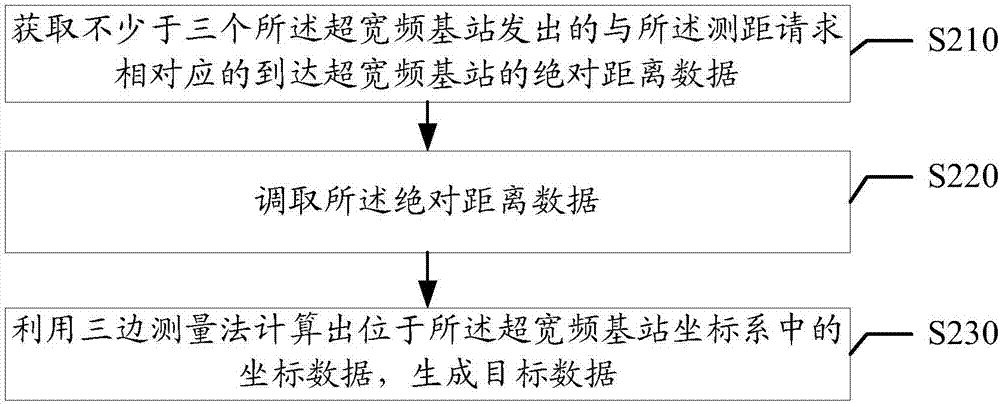
[0066] Based on the first embodiment of the above-mentioned ultra-wideband signal-based positioning and routing method, the step S200 includes:
[0067] Step S210, acquiring the absolute distance data corresponding to the ranging request sent by no less than three ultra-wideband base stations to the ultra-wideband base station.
[0068] Step S220, calling the absolute distance data;
[0069] Step S230, using the trilateration method to calculate the coordinate data located in the coordinate system of the ultra-wideband base station to generate target data.
[0070] In this embodiment, the coordinates of the target data are inferred by the trilateration method, and the receiver receives the distance data of at least 3 base stations, and uses the trilateration method to calculate its coordinates in the base station coordinate system. What needs to be understood is that trilateration is a method of laying out a series of continuous triangles on the ground, and measuring the hori...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More