

Crane control method based on input shaping technology
A technology of input shaping and control methods, applied in the field of crane control, can solve the problems of reducing production efficiency and increasing work costs, and achieve the effects of improving work efficiency, easy implementation, and accurate and effective control methods
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Below in conjunction with accompanying drawing, the present invention is described in detail:
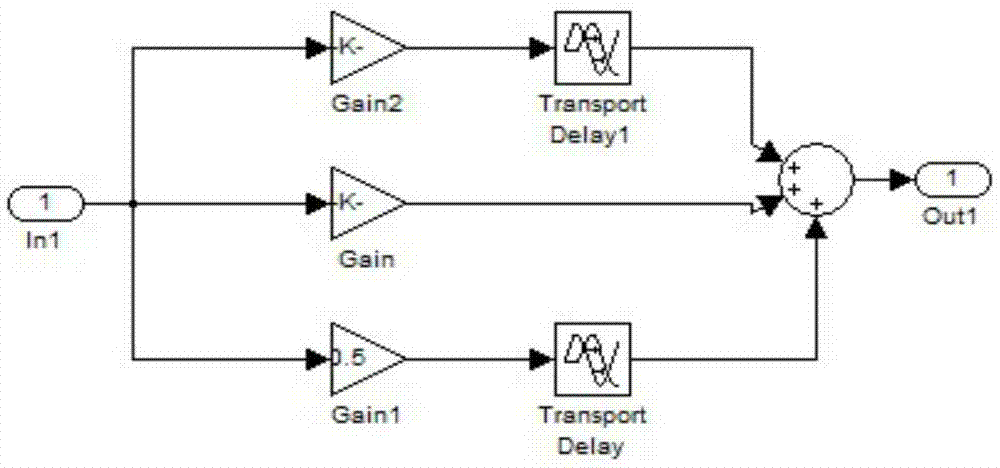
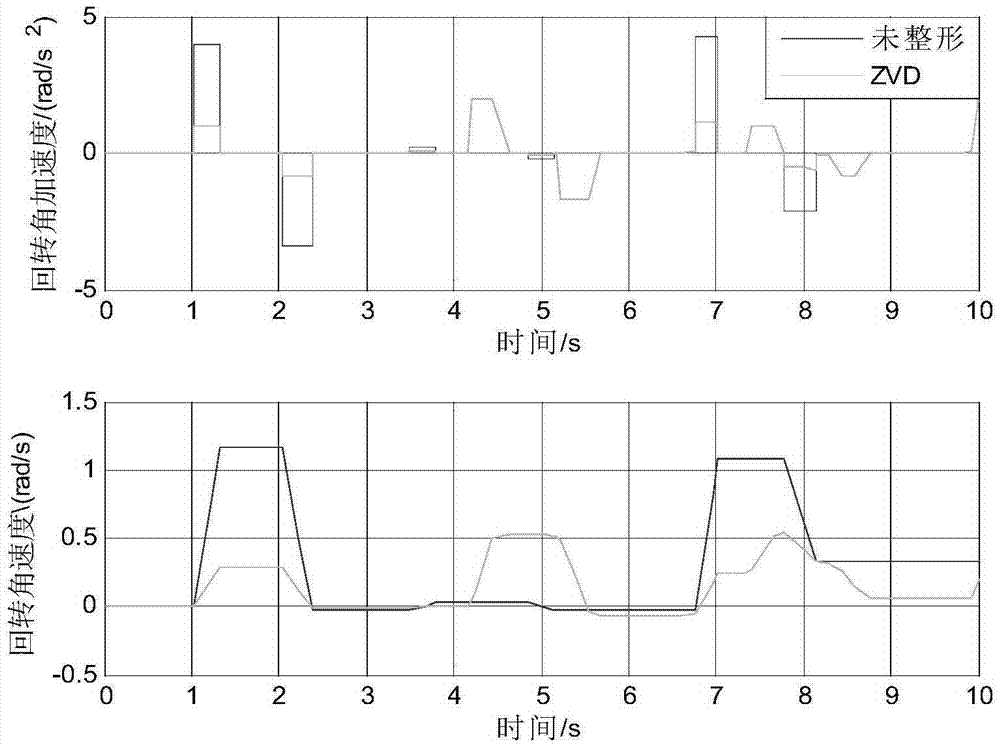
[0020] A crane control method based on input shaping technology, characterized in that by analyzing and solving the mathematical model of the crane based on the Lagrange dynamic equation, aiming at the error existing in the modeling of the actual system, using zero oscillation zero differential (ZVD) input shaping The controller is used to control the crane, and the designed zero-vibration and zero-derivative (ZVD) input shaper for the crane is simulated and verified.
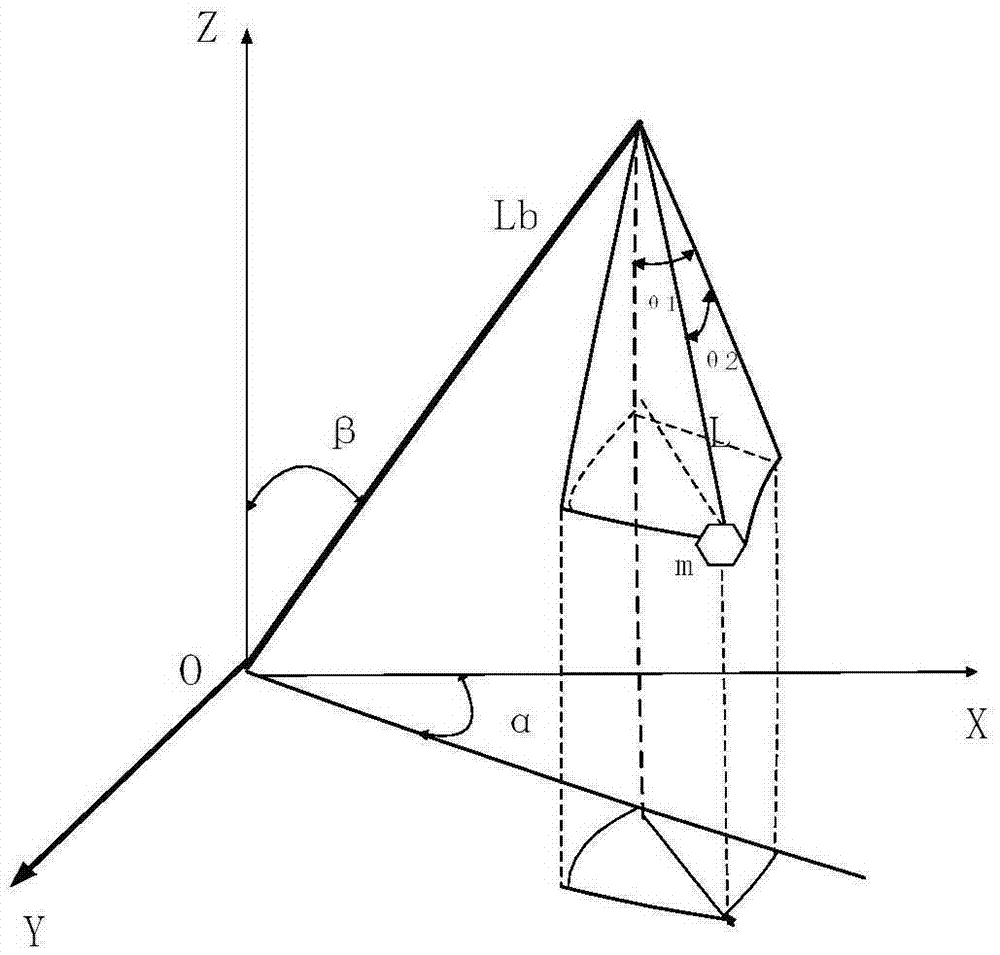
[0021] combine figure 1 In the physical model of the crane, the residual swing of the load can be expressed as the swing angle θ in the plane of the boom 1 and the swing angle θ out of the plane of the boom 2 . Let the mass of the load be m and the length of the boom be L B , the length of the rope is L, the angle between the plane of the boom and the horizontal axis of the crane (that is, the X axis) is t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More